Singapore Robotic Games 1998
NATIONAL UNIVERSITY OF SINGAPORE
COMPETITION HALL, SRC
19 - 22 MAY 1998
RULE BOOK V 2.6
6 APRIL 1998
Rules in the SRG Home Page will be used eventually in the Games.
To design a Legged Robot to travel on a designated track by either walking, running or hopping.
2.1 The robot must have at least one leg. There is no limit to maximum number of legs used. The maximum length and maximum width of the robot is restricted to a 1m x 1m square area in the starting zone.
There is no height restriction on the robot. There is no restriction on the dimension and geometry of the robot once it started each race attempt (ie: once any part of the robot crosses the starting line.)
2.2 The robots must be completely autonomous. It should contain both the controller and power units. The robot must not weigh more than 10 kg.
2.3 Radio frequency (RF) control is strictly prohibited in the robot design except for start/stop operation of the robot (i.e., remote push button to start and stop the operation of the robot.)
2.4 The limbs of the robot must include some means of controlled motion to realise the walking, running, and/or hopping action for the robot. The following are some examples NOT considered as a legged robot:
- Rotating wheel with spokes or any other structure sticking out radially to represent 'feet'.
- Traction belt with studs.
- Robot, with feet or any floor contact point, mounted with motion-assisted roller wheel(s) is strictly prohibited
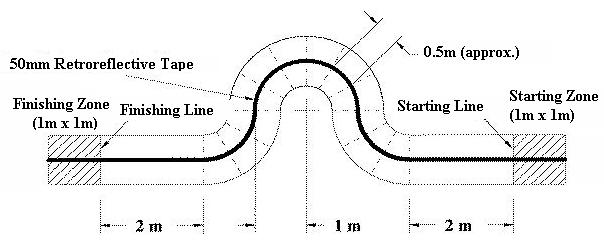
3.1 The racetrack is a raised platform of a fixed width of 1m and a maximum length of approximately 10m (not inclusive of starting zone and finishing zone.) It may comprise of straight and circular paths in the entire length. The radius of the circular path is 1m (with respect to centre of tape.) There will be a 1-meter Starting Zone and a 1-meter Finishing Zone at the start and the end of the racetrack. Figure 1 shows a typical example of a competition racetrack. It consists of a 2 meters straight path, 4 quadric-circular path, and finally a 2-meter straight path home run.
Fig. 1 Sample Legged Robot Race Track
3.2 The track is constructed with 1/4-inch plywood raised about 100 millimetres off the ground. It will be lined with 3-millimetre thick black rubber mat. It is designed to support a robot with a maximum weight of 10 kg. It is not expected to be perfectly level and it may be uneven; the maximum step at the joints is 5 millimetres. There is a 50-millimetre wide retro-reflective tape (3M Scotchlite - Industrial Grade) in the middle of the track for navigation purpose.
4.1 The robot will be "caged" 15 minutes before the start of the competition. (This includes approved electronic spare parts and spare power unit(s). Mechanical spare parts are not required for the "caging" exercise.) Once the competition starts, no individual is allowed to access the robots in the "caging" area.
4.2 The robot is to start from a stationary position before the starting line in the Starting Zone. It has to travel along the designated track either by walking, running or hopping, or any other motion not identified as wheeled motion. A valid Record Time is measured from the instance any part of the robot crosses the starting line to the moment when the last part of the robot (trailing edge) crosses the finishing line. No parts of the robot are to be left behind in the racetrack.
4.3 The robot must keep within the designated track during the race. The result is void if any part of the robot completely touches the ground or the robot fell off the track before fully crosses the Finishing line.
4.4 Each robot is given 4 minutes Competition Time to produce its best result (this include set-up time) Team may withdrawn temporarily within the 1st minute of competition and all successful run during the 1st minute (before they withdraw) will be voided. In this case, they will then re-start their entry at a later time, but will be given only 3 minutes competition time to produce its best result.
4.5 Winning is based on the shortest time to complete the FULL competition track. If the robot failed to achieve any single complete run within the Competition Time, the longest distance travelled at any single attempt will be recorded instead. As for the single attempt which started just before the lapse of the competition time, it will be allowed to continue till it crosses the Finishing line or step out / fall out of the track, and the result will be recorded.
4.6 The robot need not stop in the Finishing Zone. As there might not be any track provided after the Finishing Zone, it is the participants' responsibility to take care of their robot if it chooses to overshoot the Finishing Zone.
4.7 Modification of robot during competition is STRICTLY PROHIBITED. No extra parts are to be added to or removed from the robot once the competition time starts. On the other hand, the robot is allowed to change identical mechanical spare parts, electronic components (except for the control and memory unit) and power unit.
4.8 During the competition, chassis of each robot are not allowed to be modified and used by different controllers; likewise, individual controller is not allow to be fitted on different chassis to represent different entries.
4.9 All robots should be returned to the caging area or a designated location after its run. The teams are not allowed to take back their robots before the whole competition is concluded.
5.1 In accordance with the spirit of the competition, clones among the winning entries will only be awarded one prize. Clones will be identified during the "caging" procedure.
5.2 Clones are robots with substantially identical physical appearance and walking mechanism. Scaling of the same mechanism is considered as cloning. Robots with the same mechanism but different driving principles will not be considered as clones.
5.3 When in doubt, the decision of the Judges will be final.
The aim of this event is for mobile robots to demonstrate their horizontal and vertical surface climbing abilities during a race.
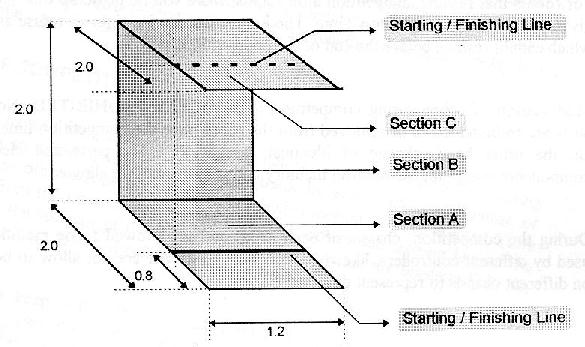
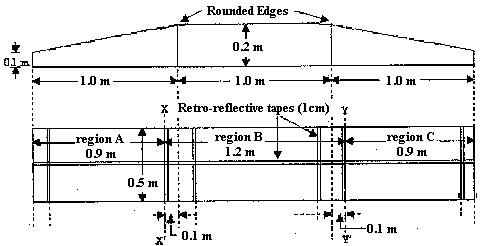
2.1 The wall is shown in Figure 1 below. It consists of three sections: a 2 metre long horizontal section (section A) on the ground followed by a 2 metre high vertical section (section B) followed by a 2 metre long horizontal section (section C) at the top, with each section 1.2 metres wide.
2.2 The surface of the wall will be covered with mild steel sections with a thickness of at least 0.003 metres. The wall will have a matt black surface finish.
2.3 Starting / finishing lines will be located 0.8 metres from the beginning of the horizontal section on the ground (section A) and 0.8 metres from the end of the top horizontal section (section C). The line in section A will be used to demarcate the maximum size of the robot.
2.4 The supporting structure for the wall will have provision for two safety cables to be attached to the robot so that both cables can be used simultaneously during the race (not shown in Figure 1.)
2.5 The wall sections A and B will each have one obstacle, consisting of a horizontal bar made of non-magnetic material (not shown) with 0.03 m X 0.03 m square cross-section, placed laterally across the entire width the section. Both of these obstacles will be placed such that one of its sides is touching the wall section. Both of these obstacles will have reflective tape fully covering the exposed sides of the obstacles. The obstacle across wall section A will be placed randomly such that it is at least 0.5 m away from the edge where it meets the next wall section (wall section B) and also at least 1.0 m from the opposite edge. The obstacle across section B will be placed randomly such that it is at least 0.5 m from both of the edges that meet with the other wall sections (wall sections A and C.)
2.6 The wall structure will be constructed such that it conforms to the following:
(a) the length of each wall section should be 2000 mm ( 5 mm.
(b) the angle formed between two adjacent wall sections should be 90( ( 0.5(.
The wall will be deemed to have satisfied criteria (a) and (b) above and be considered fit for use if each of the two distances between diagonally opposite corners (using the side view in Figure 1) lies in the range 2733 mm to 2847 mm.
3.1 The robots will be "caged" 15 minutes before the competition starts. This includes all approved electronic spare parts. No adjustments to the robots will be allowed after "caging".
3.2 Robots will start from a stationary position anywhere before the starting line on the horizontal section (section A) on the ground.
3.3 On reaching the vertical section (section B) the robots will attempt to climb up the vertical section and subsequently climb 'upside-down' to the end of the top horizontal section (section C.) On reaching the end of the top horizontal section, the robot will attempt to return to the starting point by climbing back through sections C, B and A in sequence. The sequence of wall sections to be climbed from start to finish is A-B-C-C-B-A.
3.4 The robot that completes the highest number of wall sections in the sequence according to paragraph 3.2 above wins.
3.5 In the event that two or more robots complete the same number of wall sections, the scoring system based on the formula described below will be used. This scoring system awards points so that the robot that completes either the entire course or the highest number of wall sections in the sequence described in paragraph 3.2 above (in the event that there are no robots that can complete the entire course) in the shortest time wins. The robot that scores the highest number of points according the following formula wins:
Score = 200 * W - X + Y
where
W = The number of wall sections completed by the robot excluding the first time it completes the wall section A, in the sequence according to paragraph 3.2 above.
X = The time taken (in seconds) by the robot to complete W wall sections.
Y = The bonus depending on:
(a) the extent that the robot is self contained, and,
(b) whether the robot is at least able to complete both the first two wall sections A and B in the sequence according to paragraph 3.2 above.
The bonus points will be awarded according to the table below:
| Type of Robot | Bonus |
| 1. Totally self-contained robot with internal power source and internal automatic-control / intelligence. | +400 |
| 2. Partially self-contained robot with external power source and internal automatic-control / intelligence. | +200 |
| 3. Robot with both external power source and external automatic-control / intelligence. | +100 |
| 4. Human controlled wall climbing mechanism with internal or external power source that requires manual control . | 0 |
Note: To be eligible for the bonus points the robot must at least complete both the first two wall sections A and B in the sequence according to paragraph 3.2 above
3.6 A robot is deemed to have started once any part of the robot crosses the starting line in the wall section A.
3.7 A robot is deemed to have completed its climb through a particular wall section when it fulfils all of the following conditions (a), (b) and (c) in sequence:
(a) the robot touches the wall section that it is about to complete
(b) the robot simultaneously touches both the wall section that it is about to complete as well as the next wall section in the sequence of wall sections that is consistent with its direction of travel
(c) the robot ceases to touch the particular wall section that it is about to complete and touches the next wall section in the sequence that is consistent with its intended direction of travel.
The above conditions apply to all wall sections except in the following cases:
(i) when the robot completes its climb through the wall section C for the first time in the sequence according to paragraph 3.2 above
(ii) when the robot completes the last wall section (wall section A) in the sequence according to paragraph 3.2 above;
In both cases (i) and (ii) above, the robot is deemed to have completed its climb through the wall section only when the entire robot has crossed the finishing line placed within that particular wall section.
3.8 Once the race begins, each team of participants will be given a maximum of 10 minutes to produce its best result. No extra time will be given at the beginning for participants to set-up or prepare their robots.
3.9 After the race begins, any physical handling of the robot such as touching, pulling of cables or pushing of the robot during a climb will disqualify the result of that climb. However if a robot falls off while climbing the wall, using the safety cables to break the fall of the robot is allowed and the result of the climb will be determined as specified in paragraph 3.3 above.
3.10 During the first two minutes of the 10-minute race, participating teams may seek permission from the judges to temporarily withdraw because of technical difficulties and re-enter the race at a later time. If a participating team is allowed to re-enter the race then it will have a reduced time of 5 minutes both to prepare their robot for action and to produce its best result at the same time. All race results obtained by the robot previously before the temporary withdrawal will not be considered. Permission to temporarily withdraw from the race and re-enter at a later time will not be automatically granted and the judges will use their discretion in granting permission on a case-by-case basis. Each participating team may only temporarily withdraw and re-enter the race once.
4.1 The dimensions of each of the competing robots must not exceed 0.75 metres in length, width and height at all times while the robot is in operation. For non-autonomous designs these dimensions apply for the mobile or climbing part of the robot only.
4.2 The weight of each of the competing robots must not exceed 10 kilograms. For non-autonomous designs this weight restriction applies to the mobile or climbing part of the robot only.
4.3 Competing robots must not have parts removed or added to them during the competition except for replacement of batteries or for repairs essential to the operation of the robot. The competing robots are not allowed to discard any part of their chassis during operation. The competing robots must not use chemical or combustion power methods.
4.4 The competing robots must not damage the competition environment including the wall and its supporting structure and the sensors in any way.
4.5 The competing robots must not endanger the judges and the spectators in any way. All competing robots must be firmly secured with two safety cables at all times during operation.
4.6 A robot will be disqualified during the competition if it endangers the judges, the participants or the spectators in any way during the competition, or if it damages the competition environment. Alternatively a robot may be banned from competing if, in the opinion of the judges, it is likely to pose a safety hazard or cause damage to the competition environment.
5.1 In accordance with the spirit of the competition, clones among the winning entries will only be awarded one prize. Clones will be identified during the "caging" procedure.
5.2 Clones will be identified by the working principles of the whole robotic system, such as the sequence of operations during the crossing of obstacles and negotiating the wall bends.
5.3 When in doubt, the decision of the Judges will be final.
The contestants are to demonstrate a robot that performs interesting tasks for applications such as in entertainment, domestic chores, industry etc.
2.1 The competing robots, which can be self-navigating or remote-controlled, will perform their capability on a 5m x 5m contest arena for a period of time.
2.2 The robots may move freely around the arena or be in a static position.
3.1 The competing robots can start from any point in the contest arena.
3.2 A total duration of up to 10mins is allocated for setting up the robot and any accessory equipment and demonstration of its capability. The time duration will be measured from the moment the contestants enter the arena. If more than 10 minutes elapsed, the robot must be removed from the arena.
3.3 In the case where the contestants wish to employ radio control, they should inform the secretariat in advance. Contestants should not broadcast radio signals while another contestant's robot is performing.
3.4 In the case that a robot requires special accessory equipment or tools during its performance, the contestants will provide such items.
3.5 In the case that a robot performance is to be accompanied by music, the contestants should provide the means to reproduce this music.
3.6 There is no specific flooring material of the contest arena. The flooring will very much depend on the available contest site. However, if there is a special requirement such as carpet, the contestants will have to provide for it.
3.7 One power point of 220/230V, 50 Hz supply will be made available. However, the teams are to provide their own power adapter and extension means if it is required.
3.8 For air supply, the contestants are to provide their own air compressor units if necessary.
3.9 The designs of the competing robots must be original and unique. No two identical designs are allowed in the competition.
3.10 The expenses incurred in transportation and set-up of equipment is to be borne by the individual teams.
3.11 The boundary for the area will be black or white depending on the floor colour.
4.1 A panel of 3 or 5 judges will be present to judge the event.
| Degree of Innovation | 20% |
| Entertainment Value and Aesthetics | 30% |
| Complexity & Intelligence | 20% |
| Performance to expectation | 30% |
Any mechanism which supports an inverted pendulum which is free to swing around a horizontal axis with one degree of freedom and balances it to keep it vertical by moving the point of support shall be considered "the pole balancing robot."
2.1 The inverted pendulum may be supported by a vehicle moving along a straight line. Any other innovative design, which does not violate the spirit of the competition, may be allowed at the discretion of the judges subject to the following conditions:
2.2 The inverted pendulum must be free to swing. It must be balanced by moving the pivoted support point parallel to the plane of the swing. The pivot must be fixed to the vehicle.
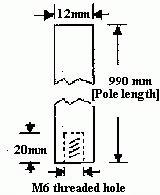
2.3 The robot must use a standard contest balance pole specified by the organisers. A sample pole will be supplied for the institutions participating in the competition. The pole material will be aluminium.
2.4 There is no size restriction on the robot. No part of the robot, other than the its wheels, must touch the surface of balance table. It must not fall off the competition table surface during the operation. No part of the robot can protrude outside of the balance table at the start of the competition.
2.5 Balancing the pendulum/pole using any form of gyroscopic principle is not admissible.
2.6 A self-balancing design in which the pendulum will always stand up due to the use of a balance weight below the axis of rotation is also not admissible.
2.7 There should be no relative motion between the pole-support axis and the body of the vehicle.
2.8 No guide rails are allowed.
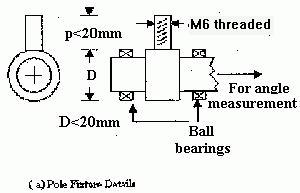
3.1 The supporting mechanism must be compatible to the diagram shown in Fig. 1. Ball bearings must be used in the axle of rotation supporting the pole, only exception being the instrumentation potentiometer or encoder. If the potentiometer or encoder is driven through gears then the gear friction must be very small as quantified in section 3.2. It must be able to swing freely from -45° to +45° from the vertical position when the vehicle is positioned in region B.
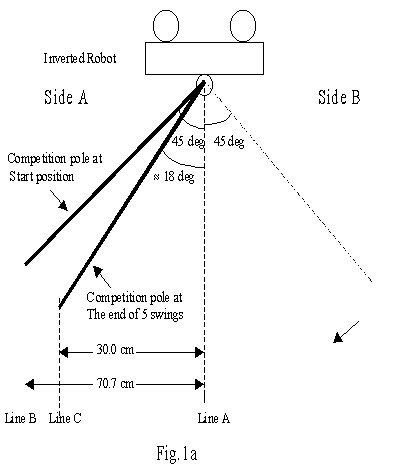
3.2 The friction of the suspension mechanism is quantified as follows:
The pole used for balancing is also used for this purpose. The robot will be placed upside-down to make the pole a regular pendulum, as shown in Fig.1a.
For the test, the robot is supported upside down such that the axle is on the vertical line A, marked on the wall or the platform built for this purpose. There will be two vertical lines on the left side. One will (extreme left line B) correspond to 45° inclination of the pole. The second inner line C will correspond to 30° inclination of the pole.
The pole is moved to side A to reach an inclination of 45° such that the tip touches the outer vertical line and is released, so that it swings back and forth. At the end of the fifth swing cycle the pole should swing back to side A and reach a minimum angle of 30° such that the tip touches the inner vertical line C.
3.3 The overall size will be such that it would be able to operate on the table provided by the organisers.
4.1 The competition table is shown in Fig.2. One common competition table will be used by all competitors. The gradient will be approximately 5.7 degrees. The edges between the inclined surfaces and the horizontal surface will be rounded off and there will be no joints at those edges. A neoprene rubber mat of 3-mm thickness will be used on the top of the table to improve the grip of the wheels.
5.1 The intelligence for the robot can come from a PC, which may communicates by wireless means to the electronics controlling the drive mechanism. In such cases, the program in the executable file form shall be in control of the robot throughout the duration of the robot's performance without human intervention except for re-starting the execution of the same program.
5.2 The vehicle must be physically autonomous, with no wires connected externally, in which case no switching of EPROM's or switching of programs using human intervention will be allowed.
5.3 No external power supply is allowed.
6.1 The robotic vehicle would operate on the top of the table provided. Please see Fig. 2. The tabletop will have a slight gradient at the start (region A) and the end (region B) zones as shown in Fig. 2.
6.2 The vehicle will be placed within the region A (see Fig. 2). The operator may move the pole (the inverted pendulum) to an upright position and release it upon receiving the signal from the judges. The vehicle must balance the pole in the upright position for a minimum of 20 seconds without the vertical pole crossing the line X-X'.
6.3 Upon completion of the task (in 6.2 above), the vehicle should move across the line X-X' once, and move through the region B, until the pole clears the line Y-Y', without losing balance during transit, i.e. not hitting any part of the table or its own chassis.
6.4 The performance of a vehicle, which moves while the pole is falling off to horizontal position, will not be admissible.
6.5 Upon completion of task (in 6.3 above), the vehicle must retrace the path, cross the line X-X' again and get back to region A. This will complete one cycle. This time, during the retrace, the vehicle need not stay any length of time at region B or A, before the start of the second cycle.
6.6 The vehicle should repeat these cycles.
6.7 To count these cycles as successful cycles they must be followed by at least 20 seconds of static balancing at region A.
6.8 The robot may continue on (untouched) for more cycles, which if successful will be counted cumulatively.
6.9 If the robot is touched by the handler during the trial, it must be restarted for the next attempt.
7.1 The vehicle with the highest number of successful cycles in a single untouched attempt will be considered the winning entry. Subsequent places will be decided similarly.
7.2 If necessary, the number of successful cycles in further attempts will be used as a tie-breaker.
7.3 If the tie is not broken by 7.2, the number of unsuccessful cycles will be considered.
7.4 If there is still a tie, it will be left to the discretion of the judges.
8.1 5 minutes will be allowed for each robot. Within the time permitted, any number of attempts will be allowed.
8.2 The time will start one minute after the name of the participant is called, or when the robot is first released by the participant, whichever is sooner.
8.3 The participants must vacate the competition area after the 5 minutes expire.
9.1 In accordance with the spirit of the competition, clones among the winning entries will only be awarded one prize. Clones will be identified during the "caging" procedure.
9.2 Clones are robots with substantially identical physical appearance and working principles.
9.3 When in doubt, the decision of the Judges will be final.
Design a mobile robot that can navigate through a minefield and reach the predetermined destination in the shortest possible time
2.1 A maximum Competition Time of 3 minutes is allocated to each round.
2.2 Each robot will commence from its respective mid-span "START" position and try to cross the predetermined destination [i.e. 'Finishing Line'] on the opposite side of the arena in the shortest possible run time. In doing so, it has to navigate through a maze of mines and obstacles while observing the rules and regulations.
To make the game more interesting, the Finishing Line is confined to a 1.5-metre wide goal post marked with two tennis balls.
2.3 The first robot, together with all parts of its body, that crosses the Finishing Line will emerge as the winner of that round. In the process, the goal-post markers [tennis balls] must not be moved or disturbed.
All robots must stop once a winner for that round is determined or when the Competition Time of 3 minutes is up; whichever is earlier.
For the Final Round, after the winner has emerged, the game can continue for other entries to vie for the remaining top positions i.e. first and second runner-up.
2.4 A robot is not allowed to continue with the race if it violates any one of the following conditions:
i) ventures completely beyond the arena boundary,
ii) triggers a mine,
iii) hits any goal-post markers i.e. moves the tennis ball,
iv) stalls in the arena for more than 30 seconds,
v) manual assistance or intervention is needed for whatsoever reasons.
Obstacles are considered as part of the maze. As such, no penalty will be imposed if they are moved or disturbed by a robot.
2.5 In each round, a maximum of four competing robots may enter the arena. Once inside the arena, a robot is permitted to push other opponent robots either out of the arena or towards a mine and/or obstacles. If a robot violates any of the conditions mentioned in 2.3 above, it will not be allowed to continue with the race.
3.1 There will be a maximum of 32 entries in the Qualifying rounds, eight in the Semi-final rounds and four in the Final Round.
3.2 During the Qualifying and Semi-final rounds, if no robot manages to complete a successful run; then no representation from that group is allowed to advance to the next level of competition.
3.3 In the Final round, entries will vie for the position either as Champion, 1st runner-up and 2nd runner-up. If no robot manages to complete a successful run after the Competition Time has elapsed, a short break of 3 minutes is permitted before a re-match is resumed.
3.4 During the re-match, if no outright winner emerges again, then all the finalists will retire and each will be awarded a consolation prize.
4.1 Entries
Line-up of Robot for competition: By drawing lots
Targeted Destination of Robot : 'Goal post' located on opposite side of arena
Max. Competition Time/round : 3 minutes
4.2 Inspection of Robot
30 minutes before the competition commences, all participants must submit their entries for inspection by a panel of judges. After which all robots must be displayed on a designated table for public viewing.
4.3 Disqualification
* After an entry has been submitted for inspection, no alterations, changes and /or modifications to their mechanical design, power supply and/or electronic circuitry are permitted before and/or during the competition without any permission from the judges. Failure to observe this ruling will subject the participant with disqualification.
* No participant is permitted to step inside the arena other than to retrieve robots that has stalled or when human intervention is required.
5.1 Specifications of Robot
i) Min. Dimensions: 300mm[Length] x 300mm[Width] x Height [No restriction]
ii) Weight: Not more than 10 kg.
iii) Power supply: Autonomous.
iv) No retro-reflective tape or coating on the robot body.
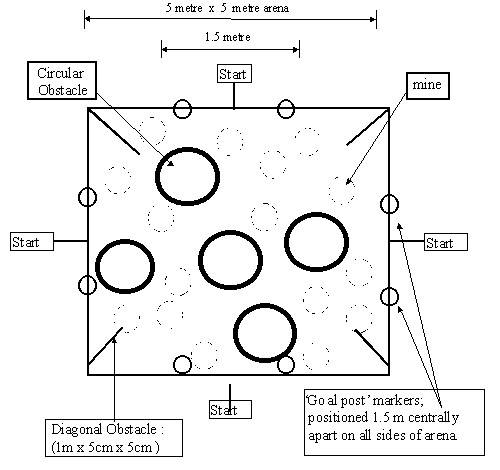
5.2 Specifications of Competition Arena [ Figure 1 ]
* Area: 5 m x 5 m [Lined with non-reflective black tapes (~ 50 mm width)]
* Floor & Light: Lighting & floor as per condition of designated Competition Hall.
* 'START': The mid-span marking on each side of arena
* Nos. of Mines: Minimum 12 mines per round
* Finishing Line: 'Goal-post' marked with two tennis balls 1.50 meters apart
* Obstacles: 5 circular BLACK plastic containers [min. ( 0.5m X min. height 0.2m] randomly positioned. 4 wooden blocks of approx.1000 mm x 50 mm x 50 mm are placed diagonally at all four corners as shown in Figure 1.
* Entries per round: Maximum 4 entries
* Distance between mines/obstacles: minimum 400 mm
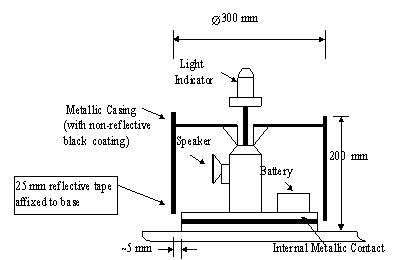
5.3 Specifications of Mines ( Figure 2 )
Dimension: Approx. ( 300 mm x 200 mm ) [height excludes light indicator]
Metallic Casing: Coated in black. Base affixed with 25 mm Scotchlite Reflective Tape.
Accessories: Built-in Lamp & Alarm system powered by battery
Activation: When mine is disturbed, the lamp & alarm system will activate.
5.4 General Tolerances
General tolerance of + 2 % is permitted for all dimensions unless otherwise specified.
6.1 In accordance with the spirit of the competition, clones among the winning entries will only be awarded one prize. Clones will be identified during the "caging" procedure.
6.2 Clones are robots with substantially identical physical appearance and working principles.
6.3 When in doubt, the decision of the Judges will be final.
Figure 1: Competition Arena
Figure 2 : Dimensional Details of Mine
The objective of the competition is to build a micromouse, which is a small autonomous robot vehicle, that is able to navigate its way through an unknown maze to search for the quickest path from the start to destination points and to negotiate this path in the shortest time.
The main challenge for the micromouse handler is to impart to the micromouse an adaptive intelligence to explore different maze configurations and to work out the optimum route for the shortest run time from start to destination; and to design a reliable micromouse which will negotiate the optimum route at a very speed without crashing into the walls of the maze.
Figure 1: Start and Destination Points and Grid Lines for Maze
1.1 The maze shall be laid out by placing pieces of walls along the grids formed by multiples of 18cm x 18 cm unit square arranged in a 16 x 16 row-column matrix. The walls constituting the maze shall be 5 cm high and 1.2 cm thick. Passageways between the walls shall be 16.8 cm wide. outside wall shall enclose the entire maze.
1.2 The sides and top of the maze walls shall be white. The floor of the maze shall be made of wood and finished with a non-gloss black paint. The coating on the top and sides of the walls shall be selected to reflect infra-red light and the coating on the floor shall absorb it.
1.3 The start of the maze shall be located at one of the four corners. The starting square shall have walls on three sides. The starting square orientation shall be such that when the open wall is to the "north", outside maze walls are on the "west", and "south". At the centre of the maze shall be a large opening, which is composed of 4 unit squares. This central square shall be the destination.
1.4 Small square posts, each 1.2 cm x 1.2 cm x 5 cm high, at the four corners of each unit square are called lattice points. The maze shall be constituted such that there is at least one wall touching each lattice point, except for the destination square.
1.5 The dimensions of the maze shall be accurate to within 5% or 2 cm, whichever is less. Assembly joints on the maze floor shall not involve steps of greater than 1 mm. The change of slope at an assembly joint shall not be greater than 4(. Gaps between the walls of adjacent squares shall not be greater than 1 mm.
2.1 The length and width of the micromouse shall be restricted to a square region of 25 cm x 25 cm. The dimensions of a micromouse which changes geometry during a run shall never be greater than 25 cm x 25 cm. There is no restriction on the height of the micromouse.
2.2 The micromouse must be completely self-contained and must receive no outside help.
2.3 The method of wall sensing is at the discretion of the builder; however, the micromouse must not exert a force on any wall likely to cause damage. The method of propulsion is at the discretion of the builder, provided the power source is non-polluting.
2.4 The micromouse shall not leave anything behind while negotiating the maze.
2.5 A micromouse shall not jump over, climb, scratch or damage the walls of the maze.
The primary task of the micromouse is travel from the start to the destination square. This is called a run and the time taken is called the run time. Traveling from the destination square back to the start square is not considered a run. The total time taken from first activation of the micromouse until the start of each run is also measured. This is called the search time. If the micromouse require any manual assistance at any time during the contest, it is considered touched. By using these three parameters the scoring of the contest is designed to reward speed, intelligence, efficiency of maze solving, and self-reliance of the micromouse.
3.1 Each contesting micromouse shall subject to a time limit of 10 minutes on the maze. Within this time limit, the micromouse may make as many runs as possible. The judges have the discretion to request a micromouse to retire early if by its lack of progress it has become boring, or if by erratic behaviour it is endangering the state of the maze.
3.2 The scoring of a micromouse shall be obtained by computing a handicapped time for each run as follows: Handicapped Time Score = Run Time + Search Penalty + Touch Penalty. Search Penalty = 1/30 th of the search time, in seconds, associated with that run, and Touch Penalty = 3 seconds if the micromouse has been touched at any time prior to the run. For example, if a micromouse, after being on the maze for 4 minutes without being touched, starts a run which takes 20 seconds; the run will have a handicapped time score of 20 + 1/30th of (4x60) = 28 seconds. However, if the micromouse had been touched before the run, an additional touch penalty of 3 seconds is added giving a handicapped time score of 31 seconds. The run with the fastest handicapped time score for each micromouse shall be the official time of that micromouse.
3.3 The time for each run (run time) shall be measured from the moment the micromouse leaves the start square until it enters the destination square. The total time on the maze prior to a run (search time) shall be measured from the time the micromouse is first activated. A run is complete only if the whole of the micromouse enters the destination square.
3.4 The time taken to negotiate the maze shall be measured either manually by the contest officials or by infrared sensors set at the start and destination. If infrared sensors are used, the start sensor shall be positioned at the boundary between the start square and the next unit square. The destination sensor shall be placed at the entrance to the destination square. The infrared beam of each sensor shall be horizontal and positioned approximately 1 cm above the floor.
3.5 The starting procedure of the micromouse should be simple and must not offer a choice of strategies to the handler. The micromouse shall be started by pressing a "start" button once. The micromouse shall be placed at the start square and started by the handler under the contest officials' instructions. Throughout the duration of the micromouse's performance, the handler shall not enter any information into the micromouse (e.g. change in search strategy, speed or maze data).
3.6 The micromouse handler is given 1 minute to make adjustments, if any, to the sensors. However, no selection of strategies must be made and no information on the maze configuration entered or captured into the micromouse. The maze search time clock will commence after the expiry of the 1-minute time limit if the micromouse handler is still making adjustments to the sensors.
3.7 When the micromouse reaches the destination square, it may stop on its own and remain at the maze centre, or it may continue to explore other parts of the maze or make its own way back to the start square. If the micromouse chooses to stop at the destination square, it may be manually lifted out and restarted by the handler. Manually lifting it out shall be considered touching the micromouse and will cause a touch penalty to be added on all subsequent runs. If the micromouse chooses not to remain in the destination square, it may not be manually stopped and restarted (see also paragraph 3.8).
3.8 If a micromouse appears to be malfunctioning, the handlers may ask the judges for permission to abandon the run and restart the micromouse from the beginning. A micromouse may not be restarted merely because it has taken a wrong turn - the judges' decision is final. If a micromouse elects to retire because of technical problems, the judges may, at their discretion, permit it to perform again later in the contest. Also, there shall be no changes made to the program or exploration strategies when the micromouse resumes its runs. This permission is likely to be withdrawn if the programme is full or behind schedule.
3.9 Before the maze is unveiled, the micromice must be accepted and caged by the contest officials, and no replacement of any parts of the micromouse shall be allowed. Once the micromouse has started on its runs, no replacement of batteries shall be allowed.
4.1 In accordance with the spirit of the competition, clones among the winning entries will only be awarded one prize. Clones will be identified during the "caging" procedure.
4.2 Clones are robots with substantially identical physical appearance and working principles.
4.3 When in doubt, the decision of the Judges will be final.
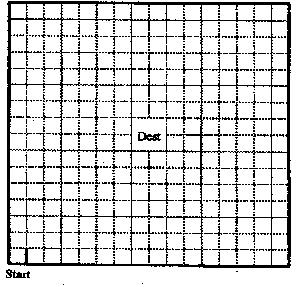
The object of the contest is to build a small microprocessor-controlled robot vehicle that is able to navigate its way, through an unknown terrain, to the target in the shortest possible time. The target is a yellow coloured square at the center of the quadrant furthest away from the starting point.
The challenge is to design and build a small vehicle capable of fast controlled motion, and provide it with sufficient intelligence to explore and negotiate around obstacles in the shortest possible time.
The purpose of this competition is to provide a technically demanding yet enjoyable problem for the participant.
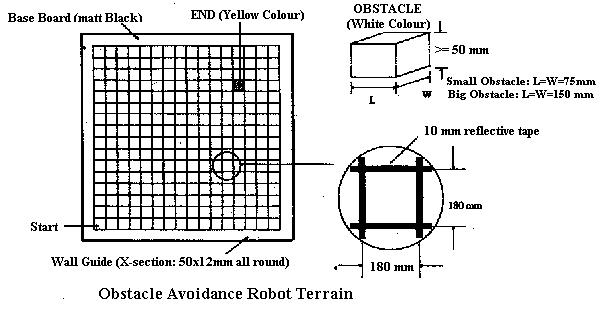
2.1 The domain for the obstacle avoidance vehicle competition is a flat area criss-crossed by reflective tape forming a 16 x 16 array of 180mm x 180mm (between centres) squares. The domain will be bounded by an unobstructed border of at least one square width. A wall of height 50mm will be constructed around the periphery to contain errant vehicles.
2.2 The domain floor and its border will be made of wood painted with non-gloss black paint. The squares marking the domain will be constructed with reflective tape (3M Scotchlite reflective tape) of 10mm width.
3.1 The obstacles will consist of rectangular wooden blocks painted with non-gloss white paint. The block can be of any height subject to a minimum of 50 mm. The length and width of the block shall be of a uniform cross-section, either 150 mm x 150 mm or 75 mm x 75 mm. The height is at least 50 mm. If a block is higher than 50 mm, then the horizontal cross-section of the block that is above 50mm can be of any shape provided no part of it extend beyond the base cross-section of 150 mm x 150 mm.
3.2 The obstacles will be placed, centrally, within squares and firmly affixed to the floor. A minimum passage width of at least one square is guaranteed.
3.3 The first move from the start position must be towards the North. This is to facilitate electronic clocking. Obstacles may be placed to ensure this.
The tolerance of the obstacles and domain platform will be within specifications specified in the attached drawings.
5.1 There will be no restriction to the length, width or height of the robot vehicle. The vehicle must be fully self contained and not receive assistance from external sources and all parts of the vehicle must travel to the target. The judge may, however, allow participants to retrieve and restart their vehicles in the event of a collision or other situations when a restart is required.
5.2 The vehicle must not attempt to change or damage its environment.
6.1 The objective of the competition would be for the robot to reach the target in the shortest time. In the spirit of the games, it was decided to keep rules to a minimum.
6.2 Each robot will perform at least two runs within 10 minutes. The timing for a run will start at the instant the judges instruct the participants to start their robots, and end at the instant any part of the robot makes contact with the target square.
6.3 All robots must travel on the surface of the domain. Robot vehicles are required to travel within the specified domain and no part of the vehicle must come in direct contact with regions outside the domain. Overhanging within the boundary is allowed.
6.4 The use of long probes reaching across obstacles does not constitute "navigate its way through an unknown terrain", and is contrary to the spirit and implied rules of this competition.
6.5 The participants will be graded on the fastest 1st run, and on the fastest run. If a vehicle requires a restart, during the first run, it will be disqualified from consideration for the fastest first run prize.
6.6 There should be at least 1 clear path (contiguous sequence of full squares) from the starting to the ending position.
7.1 In accordance with the spirit of the competition, clones among the winning entries will only be awarded one prize. Clones will be identified during the "caging" procedure.
7.2 Clones are robots with substantially identical physical appearance and working principles.
7.3 When in doubt, the decision of the Judges will be final.
Figure 1: Obstacle Avoidance Robot Terrain
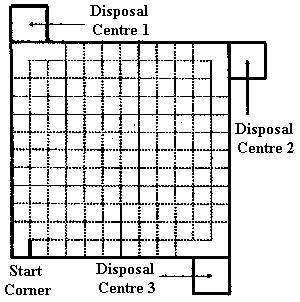
1.1 The objective of the competition is to build a self-contained autonomous mobile robot that is able to navigate its way through a network of alley-ways in search of trash-bins which it must collect and dispose of at any one of 3 designated dumping grounds. The performance of the robot is judged on the numbers of trash-bins collected and disposed in a given time duration of 10 minutes.
Figure 1: Start and Disposal Points and Grid Lines for Alley
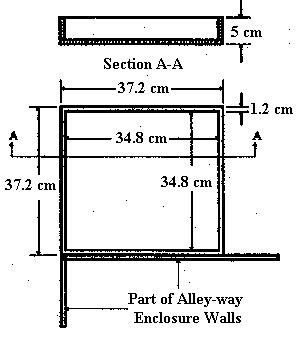
Figure 2 Disposal Centre Dimensions
2.1 The alley-ways shall be laid out on a platform by placing pieces of walls along the grids formed by multiples of 18 cm x 18 cm unit squares arranged in a 12 x 12 matrix as shown in Fig 1. The walls for lining the alleyways shall be 5 cm high and 1.2 cm thick. Passageways between the walls shall be 16.8 cm wide. The outside wall shall enclose the entire network of alleyways.
2.2 The start location for the robot shall be at one corner. Disposal centres shall be located next to the remaining 3 corners. There shall be clear passages along the alleyways adjacent to the disposal centres. Where there are no grid lines shown in the vicinity of the disposal centres, there shall be no walls. (See Fig 1)The start square shall have walls on 3 sides. The starting square orientation shall be such that when the open end is to the "north", outside walls are on the "west", and "south".
2.3 Each of the disposal centres shall be a box with a top opening. The internal dimensions shall be 34.8 cm x 34.8 cm x 5 cm (length x width x height). The thickness of the sidewalls shall be 1.2 cm (See Fig 2). The disposal centre shall be located such that the top edges are at the same level as the top of the alley-way walls and one side flushes with the side of the alley-way enclosure wall.
Figure 3: Sample AlleyWay Configuration with Trash-Bins
2.4 The sides and top of the alleyway walls shall be white. The floor of the platform shall be made of wood and finished with a non-gloss black paint. The coating on the top and sides of the walls shall be selected to reflect infrared light and the coating on the floor shall absorb it.
2.5 Small square posts, 1.2 cm x 1.2 cm x 5 cm high, at the 4 corners of each unit square are called lattice points. The alleyways shall be constituted such that there is at least 1 wall touching each lattice point. The distribution of trash-bins in the alleyways shall be such that there shall be at least 1 clear path to any 1 of the disposal centres. A sample layout is given in Fig 3.
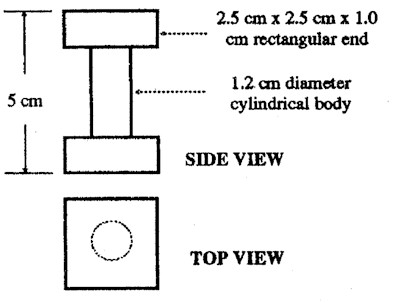
Figure 4: Trash-Bin Dimensions
3.1 The trash-bin shall be a 5-cm high dumb-bell shaped wooden post with a 1.2 ? 0.2 cm diameter cylindrical body and 2.5 cm x 2.5 cm x 1 cm rectangular ends. (See Fig 4). It shall be painted red on all sides. The weight of the trash-bin shall not exceed 15 grams.
3.2 The trash-bin shall be placed free standing at the centre of a unit square. The orientation shall be such that the sides of the trash-bin rectangular ends are parallel to the walls of the alleyway.
4.1 The length and width of the robot shall be restricted to a square region of 25 cm x 25 cm before it is out of the start square. There is no restriction to the dimensions of a robot which changes geometry after it has left the start square. There is no restriction on the height of the robot.
4.2 The robot must be completely self-contained and must receive no outside help.
4.3 The methods of alleyway wall sensing and trash-bin detection, collection and disposal are at the discretion of the builder; however, the robot must not exert a force on any wall or trash-bin likely to cause damage. The method of propulsion is at the discretion of the builder, provided the power source is non-polluting.
4.4 The robot shall not leave anything behind while negotiating the alleyways.
4.5 The robot shall not jump over, climb, scratch, damage or destroy the walls of the alleyways and disposal centres.
5.1 The basic function of the robot is seek out and collect as many trash-bins as possible which are placed along alley-ways and to dispose of them in any of 3 disposal centres within the given performance time period. The disposal strategy is left to the robot builder. For example, the trash-bins can be collected and disposed of one at a time, or the robot could collect and dispose several trash-bins at a time.
5.2 A trash-bin is considered disposed if more than half of its body is within the collection centre. Any trash-bin unsuccessfully disposed but resting on top of the collection centre wall(s) shall be removed and discarded only at the end of the robot's performance. Any trash-bin unsuccessfully disposed and has fallen onto the floor shall be removed and discarded when the robot subsequently crashes and has been retrieved by its handler. (See also clause 5.5)
5.3 The robot will be judged on the number of trash-bins disposed in the designated disposal centres within the time duration given and if it is able to dispose of all the trash-bins, then the time taken to do so will be the main criterion. In the event that 2 or more robots that have disposed the same number but not all of the trash-bins within the time given, then the number of trash-bins collected but not disposed, including those still remaining in the robot at the instance of the expiry of the competition time given shall be used as the next level of performance criterion. A third level criterion will be the number of times the robot had to be retrieved and restarted during the performance period. If there is still a tie, then the judges will decide on the better robot based on other criteria solely at the discretion of the judges.
5.4 The starting procedure of the robot should be simple and must not offer a choice of strategies to the handler. The robot shall be started by pressing a "start" button once. The robot shall be placed at the start square and started by the handler under the officials' instructions. Throughout the duration of the robot's performance, the handler shall not enter any information into the robot.
5.5 In the event that a robot crashes into the alleyway wall(s) and loses it bearing, then it is retrieved by the handler. The robot shall be re-started in a start location (one of the corners), and the size of the robot must be restricted to 25 cm x 25 cm at the start location (consistent with para. 4.1). The trash-bins that have been displaced shall be removed and discarded by contest officials before the robot is re-started. Any trash-bins collected and properly held by the robot in its collection mechanism shall also be discarded but kept aside for a fourth level of arbitration criterion in event of a tie as provided for in paragraph 5.3. The chief judge (who shall be the rules committee chairman) in consultant with the other judges, if any, determine whether a trash-bin has been "collected and properly held in the collection mechanism". In any event, any trash-bin that has been discarded shall not be available for collection and disposal by the robot when it is re-started.
5.6 If a robot appears to be malfunctioning, the handlers may ask the judges for permission to retrieve and restart the robot from the start square. A robot may not be restarted merely because it has taken a wrong turn - the judges' decision is final.
5.7 If a robot elects to retire because of technical problems, the judges may, at their discretion, permit it to do a fresh performance later in the contest but with a reduced time duration of 6 minutes. The result of the robot's second attempt shall be its official performance and its earlier attempt shall be null and void even if eventually the result of the first attempt is better than its second attempt. Also there shall be no changes made to the program, seek strategies and collecting method/mechanism when the robot is being repaired except for batteries and identical spare parts. This permission is likely to be withdrawn if the programme is full or behind schedule.
5.8 Before the alleyway configuration and trash-bin placements are unveiled, the robots must be accepted and quarantined by the contest officials, and no replacement of any parts of the robot. Once the robot has started, no replacement of batteries shall be allowed during the full duration of its performance.
6.1 In accordance with the spirit of the competition, clones among the winning entries will only be awarded one prize. Clones will be identified during the "caging" procedure.
6.2 Clones are robots with substantially identical physical appearance and working principles.
6.3 When in doubt, the decision of the Judges will be final.
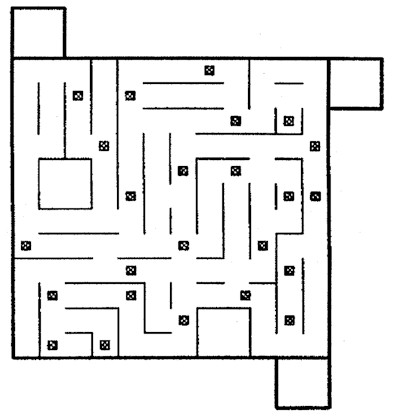
The nature of this contest is similar to the Pac-man computer game. It consists of two robots, namely Tom-the-Cat and Jerry-the-Mouse. These two robots have to work together to collect food on the maze. Tom's mission is to bring fish back to the cat's home. Jerry's mission is to bring cheese back to the mouse's home.
Tom and Jerry are not allowed to pick up their partner's food. However they may communicate with each other to help complete the food scavenging as fast as possible. For example, if Tom meets a piece of cheese, it is not allowed to pick the cheese up, but it can signal the location of this cheese to Jerry, who will remember to pick up this cheese. Similarly, Jerry may inform Tom of any fish seen on the maze.
The game is completed when all food pellets has been collected or the time of 10 minutes are up.
2.1 Any form of mobile robots (wheeled or legged) are acceptable for this competition.
2.2 The length and width for Tom and Jerry shall be restricted to a square region of 25 cm x 25 cm. There is no restriction on the height of the robots.
2.3 The robot has to be COMPLETELY autonomous.
2.4 The Cat and Mouse should not leave anything behind while negotiating the maze.
3.1 The domain is a flat area criss-crossed by reflective tape forming a 16 x 16 array of 180mm x 180mm (between centres) squares. The domain will be bounded by an unobstructed border of at least one square width. A wall height of 50mm will be constructed around the peripheral to contain errant robots.
3.2 The domain floor and its border will be made of wood painted with non-gloss black paint. The squares marking the domain will be constructed with reflective (3M Scotchlite reflective tape) of 10mm width.
3.3 There are 2 Home positions marked by the squares located at diagonal corners of the maze. One Home square for Tom-the-Cat and the other for Jerry-the-Mouse.
3.4 The tolerances of the domain platform will be within the specifications specified in Figure 1 below:
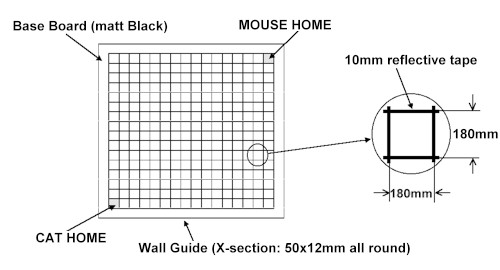
Figure 1: Cat and Mouse - The Scavengers' Terrain
4.1 The Fish and Cheese shall be flat pellets of 0.5mm thickness, with square (fish) and round(cheese) shapes. They are made of unfinished galvanised steel sheets (0.5mm) which can be picked up by magnet. A sample pellet will be given to each represented institution.
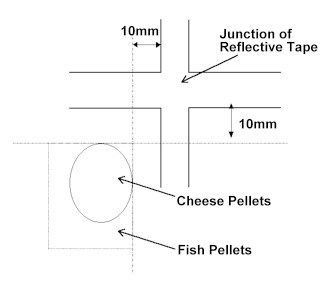
4.2 The Fish and Cheese are to be placed at any corner of the squares formed by the tracks. The gap of separation of the track and the Fish-edge or Cheese-edge, should be 10 mm. See Fig.2 below.
Figure 2: Cat and Mouse - Placement of Food Pellets
4.3 At any square, there may be more than one food pellet placed. However, at any intersection of the tracks, there will not be more than one food pellet placed.
4.4 The Fish pellet dimension is a square of 3 cm x 3 cm.
4.5 The Cheese pellet dimension is a round disk of diameter 2 cm.
5.1 Each run shall be subjected to a time limit of 10 minutes on the maze. Within this time limit, Tom and Jerry may make as many runs as possible.
5.2 There will be 5 pieces of Fish and 5 pieces of Cheese on the maze.
5.3 The robot starts from Home position. It may start in any orientation within the Home square.
5.4 Once the robots are out of the Home position, it can only go back to the respective homes with a food pellet. The robot is considered to have returned to Home position when any part of the robot is inside the Home square.
5.5 Tom may only deposit Fish in the Cat's home. Jerry may only deposit Cheese in the Mouse's home. The deposit of food into Home position means that the final resting position of the food must be within the Home square and not touching the tape.
5.6 Once each food pellet is brought and dropped at Home position, participants may re-position the pellets at the border area outside the maze. This is to prevent the food pellets from cluttering the homes.
5.7 The robots must pick up and bring back only one piece of food at each time. In manoeuvring the maze, a robot is NOT allowed to physically touch more than one pellet at any time.
5.8 The robots are NOT allowed to touch each other. Once they touch each other while manoeuvring the domain, both robots are considered to have crashed.
5.9 The game ends when :
a. All food pellets has been collected.
b. Time of 10 minutes is up.
5.10 Judging Criteria :
a. The shortest time to complete the game.
b. Penalty of 1 minute to be given for each food pellet not taken home.
c. Penalty of 30 seconds to be given to each wrong food pellet taken home.
d. For the following instances, a robot is required to restart from home position, and the food pellet picked up will be returned to its original position:
i. robot has crashed.
ii. robot has dropped it's food outside it's home.
iii. robot has touched more than one food pellet at a time.
6.1 In accordance with the spirit of the competition, clones among the winning entries will only be awarded one prize. Clones will be identified during the "caging" procedure.
6.2 Clones are robots with substantially identical physical appearance and working principles.
6.3 When in doubt, the decision of the Judges will be final.
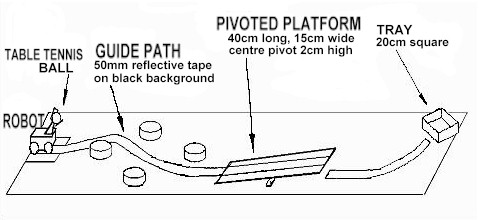
To build a fully autonomous microcontroller-controlled robot to trace a guide path, through a maze of obstacles, and travel across a pivoted platform to deliver a ball to a target tray.
The shortest time to complete the task successfully.
3.1 The robot is to be controlled by an on-board microcontroller and powered by on-board battery.
3.2 The maximum size of the vehicle is 20 cm long and 15 cm wide.
3.3 The race course is approximately 2 metre long and 0.5 m wide.
3.4 The robot will start from a starting frame at one end of the track and carry a table tennis ball. It is to trace along a guide path and travel around several obstacles to reach a pivoted platform. It is to go over the platform and deliver the ball into a tray located at the far end of the track. The guide path is made up of reflective tape of 50 mm wide on black background.
3.5 The robot is given 12 minutes to produce its best result.
3.6 A penalty of 5 seconds will be added for every adjustment made during each run. Only 3 adjustments are allowed for each run.
3.7 Permission may be granted for 1 recess and it carries a penalty of 3 minutes on the competition time.
1.1 Dimensions
A dark green, wooden rectangular playground (130cm x 90cm) with 5cm high white side walls, will be used. The surface texture of the board will be that of a ping-pong table.
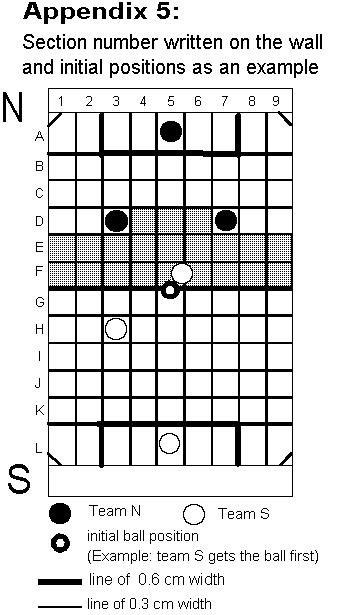
1.2 Marking on the playground
The field of play shall be marked with white lines as in Figure 5. The half-line and the goal lines shall be marked by lines of 0.6cm thickness. On the field, lines of 0.3cm thickness shall be marked at every 10cm to aid the robots in recognizing their positions. On the surrounding walls, each sections shall be marked with a unique alphanumeric code to help the three human team members (the "manager," the "coach" and the "trainer"), in communicating to the robots of their positions on the field. The four corners of the table shall be chopped off (by 7cm), to avoid the ball getting cornered (See Figure 1 and 5).
1.3 The Goals
Goal posts shall be placed at the center of each goal-line wall and shall consist of two upright posts placed at 30cm apart. A horizontal cross bar, black in color, will be placed at a height of 12cm over the posts. The goal-posts and the cross-bar shall have the same cross-sectional area (See Figure 2). Nets shall not be attached on the cross-bars for the vision system.
1.4 The Goal Area
The areas, (A:3-7) and (L:3-7), are called the goal areas (See Figure 1 and 5).
1.5 The Ball
An orange golf ball shall be used as the ball (with diameter 42.7mm, weight 46g).
1.6 The Field Location
The field shall be indoor (See Figure 1).
1.7 The Lighting Condition
The lighting condition in the competition site shall be fixed around 1,000 Lux.
2.1 Overall System
A match shall be played by two teams, each consisting of three robots, one of which can be the goalkeeper (See (b)(2) of Law 2). Three human team members, a manager, a coach and a trainer shall, only, be allowed on the stage. One host computer per team, mainly dedicated to vision processing and other location identifying, shall be used (See Figure 3).
2.2 Robots
2.2.1 The size of each robot shall be limited to 7.5 cm x 7.5 cm x 7.5 cm. The height of the antenna shall not be considered in deciding the size of robot.
2.2.1.1 The tops of the robots must not be colored in orange, dark green or in white. The Robot teams shall be distinguished by the assigned color(blue or yellow) patches. All the robots must have a 3.5 cm x 3.5 cm solid square region of their team color patch (exactly as provided by the organizers) visible on their tops. Please note that, a team's color might change from game to game, so the color patches should be removable (See Figure 4). When assigned with one of the 2 team colors, the robots must not have any visible color patches of that of the opponent team.
2.2.1.2 The sides of the robots should be colored with light colors, except at regions necessarily used for robot functionality (such as sensors, wheels, and ball catching regions). The siding is intended to enable infrared sensing. The robot should have their uniforms and its size shall be limited to 8cm x 8cm x 8cm.
2.2.2 The robot inside its own goal area shall be considered as the "goalkeeper." The goalkeeper robot shall be allowed to catch or hold the ball only within its own goal area.
2.2.3 Each robot must be fully independent with powering and motoring mechanisms self-contained. Only wireless communication shall be allowed for any kind of interactions between the host computer and the robot.
2.2.4 The robots are allowed to be equipped with arms, legs, etc., but they must meet the size restrictions even with the appendages fully expanded. None of the robots, except the single designated goalkeeper shall be allowed to catch or hold the ball such that more than 30% of its diameter is not out of the view either from top or from the sides. The ball should never be lifted off the ground (See Figure 4).
2.2.5 Any time the referee whistles, all robots should be stopped by using the communication between the robots and the host computer.
2.3 Substitutions
Three substitutes shall be permitted while the game is in progress. At half time, unlimited substitutions shall be made. When a substitution is desired while the game is in progress, the concerned team manager should call "time-out" to notify the referee, who will stop the game at an appropriate moment. The game will get restarted, with all the robots and the ball placed at the respective positions, as were occupying at the time of interrupting the game.
2.4 Time-Out
The team managers can call for time-out to notify the referee. The referee should approve such requests in cases of fouls, freeballs, goals and other situations the referee stops the play. Each team shall be entitled to requesting for time-out, twice in a game and each shall be for a duration of 2 minutes.
The manager, the coach or the trainer may transmit certain commands directly from the remote host computer to their robots. Commands, such as, reset signals to stop all robots or the restart signals can be transmitted during play. Other strategy informations can be communicated only when the game is not in progress. The manager, the coach or the trainer under no circumstances, directly control the motion of their robots either with joysticks or by keyboard commands. The host computer can send any information during the game, autonomously.
Vision system shall be used. The location of camera or any other sensor systems should be restricted to the top of the area above a team's own half of the field including the center line (so that the camera need not be moved at half time). If both teams wish to position their cameras over the center circle, the cameras shall be placed side by side at equal distance from the center and as close as possible. The height of the camera or the sensor system should be higher than or at least equal to 2 m, above the field (See Figure 3).
5.1 The duration of the game shall be two equal periods of 5 minutes each with a half time interval for 10 minutes. An official time-keeper shall stop the clock, during any substitutions, while transporting the injured robots from the field, during time-out and due to other causes as at the discretion of the time-keeper.
5.2 If a team is not ready to resume the game after the half time, additional 5 minutes shall be allowed. Even after the allowed additional half time, such a team that is not ready to resume the game, shall get disqualified from the game.
6.1 Before the beginning of the game, either the team color (blue/yellow) or the ball shall be decided by a toss of a coin. The team getting the toss shall be allowed to choose between, either their robot's color or the ball. The team getting the ball shall be allowed to option for their carrier frequency band as well.
6.2 The attacking team shall be allowed to get positioned freely within its own area, to begin with. Then the defending team can place its robots freely within its own area except at (F:1-9), (E:1-9) and (D:4-6), or, at (G:1-9), (H:1-9) and (I:4-6) as the case may be (see Figure 5). A robot of the attacking team can be placed in its opponents side at (F:4-6) or (G:4-6) as applicable.
6.3 Place-kick: The ball must be kicked or passed towards its own side at first kick. With a signal by the referee, the game shall be started and all robots may move freely.
6.4 At the beginning of the game or after a goal has been scored, the game shall be commenced/continued, with the positions of the robots as described in (b) of Law 6.
6.5 After the half time, the teams shall have to change their sides.
7.1 The Winner
A goal shall be scored when the whole of the ball passes over the goal-line. The team scoring the greater number of goals during a game shall be the winner.
7.2 The Tie-break
In the event of a tie after the second half, the winner shall be decided by sudden death rule. The game shall be continued with the robot positions, as were, at the end of the second half time, for a maximum period of three minutes. The team managing to get the first goal shall be declared as the winner. If the tie persists even after the extra 3 minutes of play, the winner shall be decided by penalty-kicks (three chances for each team), which differs from Law 11, as only a kicker and a goalkeeper shall be allowed on the playground. The goalkeeper should be in its own goal area and the positions of the kicker and of the ball shall be the same as in Law 11. After the referee's whistle, the goalkeeper may come out of the goal area. In the case of a tie even after the three-time penality-kicks, additional penalty-kicks shall be allowed one-by-one, until the winner can be decided. All penalty-kicks may be taken by one robot and shall commence with the referee's whistle. A penalty-kick shall be assumed to be completed, when any one of the following happens:
(1) When the goalkeeper catches the ball in the goal area.
(2) When the ball comes out of the goal area.
(3) When 30 seconds passes after the referee's whistle.
A foul shall be called in the following cases:
8.1 Colliding with a robot of the opposite team, either intentionally or otherwise: the referee shall call such fouls, that directly affect the play of the game or that appears to have potential to harm the opponent robot. It is permitted to push the ball and an opponent player backwards provided the pushing player is always in contact with the ball. It is not permitted to push the goalkeeper robot under any circumstances in goal areas (even if the ball is between the pushing robot and the goalkeeper). If an attacking robot pushes the goalkeeper in its goal area, the referee shall call the "goal-kick" as "goalkeeper charging."
8.2 Attacking with more than one robot in the goal area of the opposite team (a robot is considered to be in the goal area if it is more than 50% inside, as judged by the referee), shall be penalized by the award of a goal-kick to be taken by the opposite team.
8.3 Defending with more than one robot in the goal area (a robot is considered to be in the goal area if it is more than 50% inside, as judged by the referee), shall be penalized by the award of a penalty-kick to be taken by the opposite team. An exception to this is the situation, when the additional robot in the goal area is not there for defense or if it does not directly affect the play of the game. The penalty-kick situation shall be judged by the referee.
8.4 Being called "Handling" by the referee: when a robot that is not a goalkeeper catches the ball or a goalkeeper catches the ball out of its own goal area. It is also considered Handling if a robot firmly attaches itself to the ball so that no other robot can get the ball. A penalty-kick will be called against the team committing Handling.
8.5 Once the ball enters a goal area, the goalie robot should kick the ball out of that area within 10 seconds.
The play is interrupted and relocation of robots shall be taken by person only when:
9.1 a robot has to be changed.
9.2 a robot has fallen in such a way as to block the goal.
9.3 a goal is scored or a foul occurs.
9.4 referee calls "goal-kick" (See Law 12) or "free-ball" (See Law 13).
Only the referee and each team's manager, coach or trainer shall be allowed to touch the robots. Touching the robots during the play without the referee's permission shall be penalized by the award of a penalty-kick.
The team that fouled takes positions in the specified sections ((B:3) and (B:7), or (K:3) and (K:7) as may be the case) in front of its own goal line, while, the other team starts in the sections in front of the half line. The ball should be placed between the two teams. The attacking team can be positioned freely within its own area and the section next to the half line (See Figure 6). When the whistle blows, all robots can start moving freely.
When a penalty-kick is called by the referee, the ball, the robot taking the kick, and the opposing goalkeeper shall be placed in specified areas (respectively at (I:5), (H:5) and (L:5) or at (D:5), (E:5) and (A:5) as the case may be). Other robots shall be placed freely within the other side of the half-line (but the attacking team will be getting preference in positioning their robots). The game shall be restarted normally (all robots can move freely) after the referee's whistle. The robot taking the kick may kick or dribble the ball (See Figure 7).
A goal-kick will be called by the referee whenever the goalkeeper catches the ball in its own goal area, or when an attacking robot pushes the goalkeeper in the goal area, or when a stalemate occurs for 10 seconds in the goal area. The goalkeeper robot and the ball shall be placed in specified areas (at (A:5) and (B:5) or at (L:5)) and (K:5) as the case may be). The attacking team will be getting preference in positioning their robots in the whole of the playground. Then the defending team can place its robots anywhere. But, it must be as per Law 8 (c). The game shall be resumed by the referee's whistle (See Figure 8).
A free-ball will be called by the referee when a stalemate occurs for 10 seconds outside the goal area. The field shall be divided into 4 areas ((B:1)-(F:5): Area P, (B:5)-(F:9): Area Q, (G:5)-(K:9): Area R and (G:1)-(K:5): Area S). When a free-ball is called within an area, the ball will be placed at its middle. One robot per team shall be placed at locations one section apart from the ball position. The game resumes when the referee gives the signal and all robots may then move freely. At this moment, the defending team can place one robot at the goalie position. Other robots (of both teams) can be placed freely outside the area where the free-ball is being called (but with the rule that, the attacking team getting their preferences in positioning their robots (See Figure 9)).
 |
 |
 |
 |
| No. | Event Name | Section | Page | Brief Description |
| 1 | Pole Balancing Robot Competition | 3.2 | 10 | Change in Friction Test. |
| No. | Event Name | Section | Page | Brief Description |
| 1 | Robot Soccer Competition | 33 | Inclusion of rules for Robot Soccer Competition. |
| No. | Event Name | Section | Page | Brief Description |
| 1 | Schools' Robotic Games | 32 | Inclusion of rules for Smart Delivery Robot. |
| No. | Event Name | Section | Page | Brief Description |
| 1 | Legged Robot Race | 5.1 | 3 | Clarify limitation of clones. |
| 2 | Legged Robot Race | 5.2 | 3 | Clarify definition of clones. |
| 3 | Wall Climbing Robot Race | 5.1 | 7 | Clarify limitation of clones. |
| 4 | Wall Climbing Robot Race | 5.2 | 7 | Clarify definition of clones. |
| 5 | Pole Balancing Robot | 9.1 | 13 | Clarify limitation of clones. |
| 6 | Pole Balancing Robot | 9.2 | 13 | Clarify definition of clones. |
| 7 | Robot Battlefield | 6.1 | 16 | Clarify limitation of clones. |
| 8 | Robot Battlefield | 6.2 | 16 | Clarify definition of clones. |
| 9 | Micromouse Competition | 4.1 | 20 | Clarify limitation of clones. |
| 10 | Micromouse Competition | 4.2 | 20 | Clarify definition of clones. |
| 11 | Obstacle Avoidance Robot | 7.1 | 22 | Clarify limitation of clones. |
| 12 | Obstacle Avoidance Robot | 7.2 | 22 | Clarify definition of clones. |
| 13 | TrashBin Disposal Robot | 6.1 | 27 | Clarify limitation of clones. |
| 14 | TrashBin Disposal Robot | 6.2 | 27 | Clarify definition of clones. |
| 15 | Cat and Mouse | 6.1 | 31 | Clarify limitation of clones. |
| 16 | Cat and Mouse | 6.2 | 31 | Clarify definition of clones. |