Robot Soccer Competition
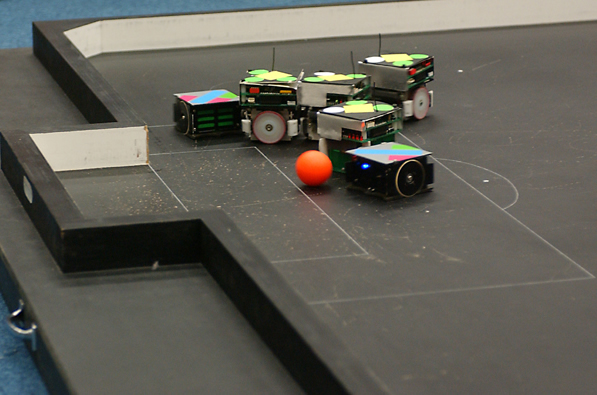
The robot soccer system consits of three bi-wheel type robots with radio-frequency (RF) receiver, a host computer and RF-transmitters. The robot receive two parameters (right and left wheel velocities) via the RF-receivers. The host computer uses Visual C++ as its programming platform. The robot soccer system is associated with cooperation, decision-making, planning, modelling, learning, robot architecture, vision tracking algorithm, sensing, communication, and so forth. In this system each of the robots has its own driving mechanism, communication part and CPU board. The computational part controls the robot's velocity according to the command data received fromt he host computer. All calculations on vision data processing, strategies, and position control of the robots are done in the host computer.