Technologies
Localization of magnetic field
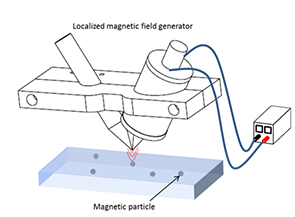
We have developed a novel device capable of localizing and controlling the area of influence of a magnetic field. The device uses an electromagnetic needle and a flux collector strategically positioned relative to each other to realize magnetic field localization. It is capable of concentrating the generated field in a given region and creating various magnetic field focusing points within a 3D region.
Automatic magnetic micro-particles manipulation
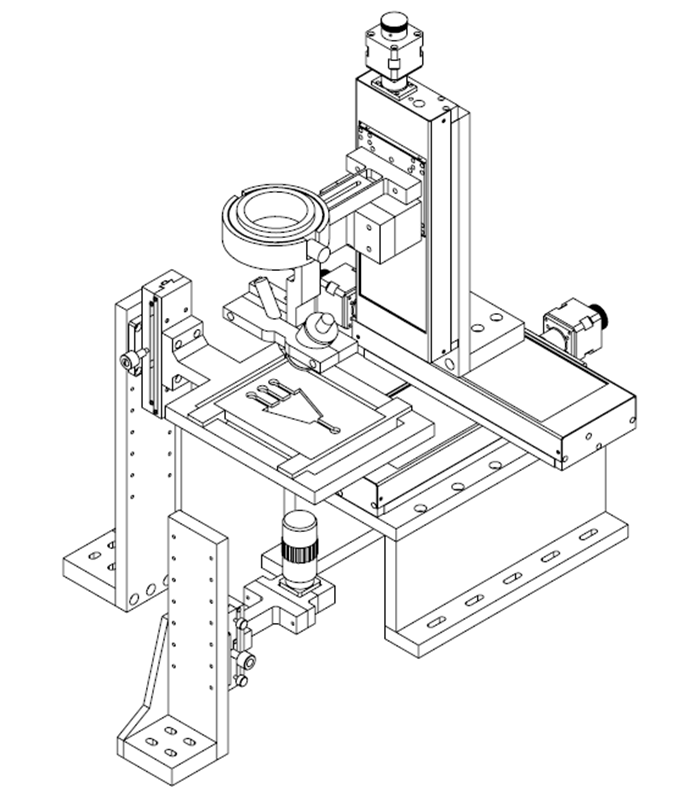
We have developed a magnetic micromanipulation system capable of achieving effectively simultaneous manipulation of multiple magnetic particles. It is equipped with a device (with 3 DOF) for generating a spatially reconfigurable localized magnetic field and a high speed inverted camera for visual feedback. The system is capable of applying localized magnetic forces on the individual particles in an ensemble at high frequency to achieve effectively simultaneous manipulation.
Automatic part registration and error estimation
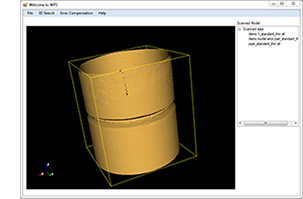
We have developed a framework for in-situ workpiece model error compensation for adaptive robotic task execution. The proposed approach is capable of capturing workpiece model by 3D scanning technology, identifying model error and compensating error by robot tool path modification. A software system named IMEC (In-situ Model Error Compensation) is developed providing a graphical user interface to facilitate the automated implementation of the proposed approach.
Constrained Microrheology of ECM
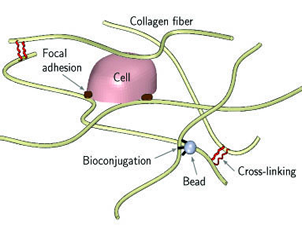
We have developed a method of constrained microrheology to study deformation in extracellular matrix (ECM). Streptavidin-coated micro-particles are embedded in the ECM and thus bind to the collagen fibers to serve as markers for ECM deformation. If the micro-particles are also magnetic, the structure of the ECM can be altered by applying an external magnetic field. A localized magnetic field can be applied at specific a region to counteract the traction forces generated by cells, leading to a change in the apparent local stiffness of the ECM (as perceived by the cells).
Contact us
Peter C.Y. Chen (PhD)
Associate Professor
Department of Mechanical Engineering
Faculty of Engineering
National University of Singapore
Email: mpechenp@nus.edu.sg