 |
 |
|
|
|
 |
 |
 |
|||||||||
 |
Specifications
|
||||||||
|
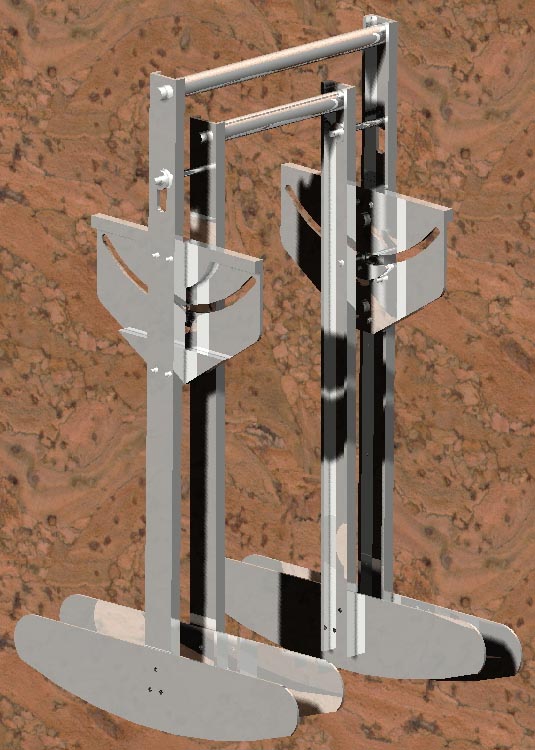
The passive walking system was inspired by the motion of a rolling wagon wheel. The rolling motion can be transformed into a walking motion by simply splitting the rim from the wagon wheel. Then discard all but two spokes, leaving a pair of legs with semicircular feet. In this project, a model that has a 2D motion was studied. This simplifies motion but poses new problems - how to keep the system motion 2D, and how to clear the swing foot from hitting the ground.
|
|||||||||
|
Videos Trial Run of First Prototype [Video-PassiveWalker] Walking Down A 3 Degree Slope [Video-3Degree] Walking Down A 4 Degree Slope [Video-4Degree] Walking Down A 5 Degree Slope [Video-5Degree] |
|||||||||
