|
Projects |
 |
 |
 |
 |
 |
 |
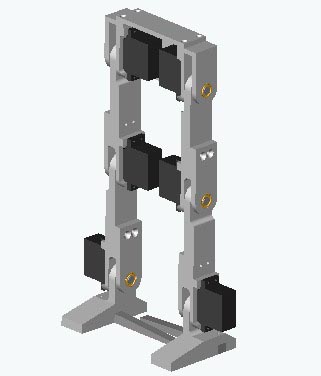
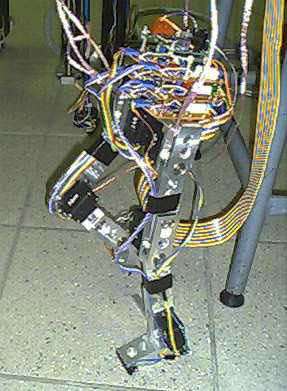
The objective of this project is to design and fabricate of a small (about 0.5m tall) planar bipedal robot. This means that the motion of the robot will be constrained in the sagittal plane. This robot will have 3degrees-of-freedom (namely: hip, knee and ankle) at each leg. Each DOF is a pin joint actuated by a DC servo-motor. A digital encoder will be attached to each joint to provide the joint angle information. A rate gyro will be used to provide the pitch angle of the body. A desktop PC will be used to control the robot. This robot will eventually be a test-bed to evaluate bipedal walking algorithms.
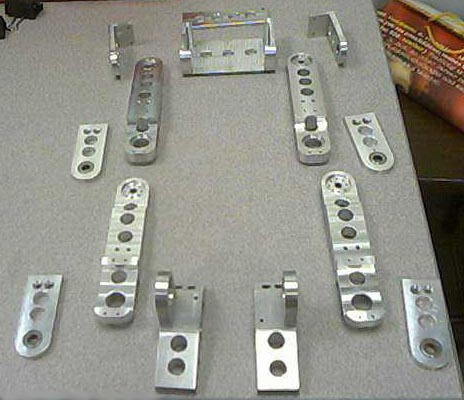
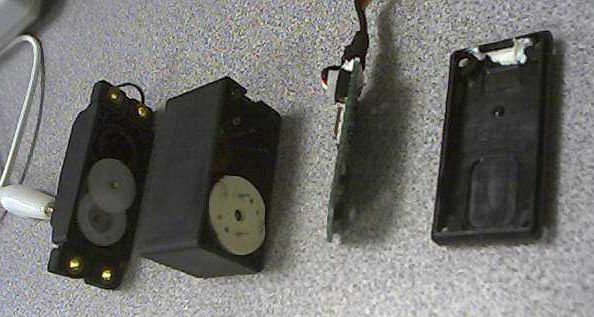
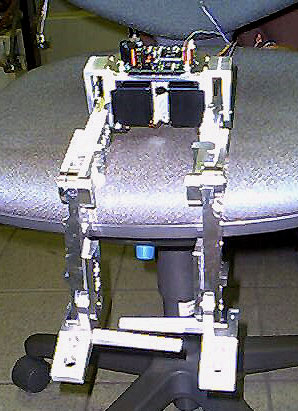
Current Project Status Currently, the robot has been fabricated. Testing is being conducted on the robot to test various parts - motor, controller, and mechanism.
Videos [New Videos Added!!] Robot in Action [Video-2D]
|