|
This
project is in collaboration with Professor Teresa Zielinska, Warsaw
University of Technology, Warsaw,
Poland.
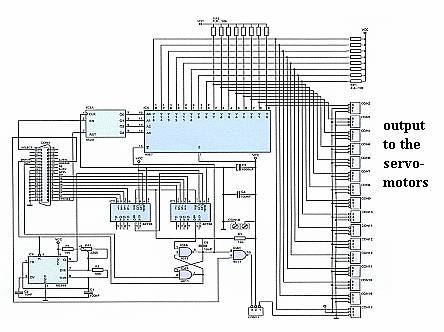
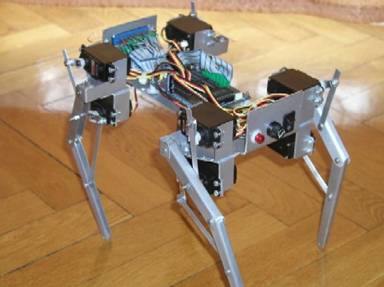
Two
small walking machines were build using aluminum material.Both machines
uses cheap servo motors, and low level control was implemented in on-board
controller designed and manufactured by research group. The high level
control was located in the stationary PC connected by the cable with the
machine. Both machines move using the gait patterns observed in animals
world.
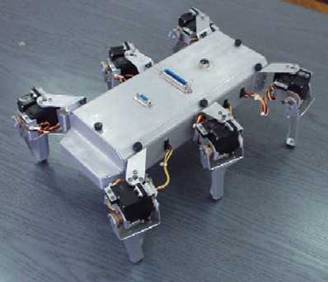
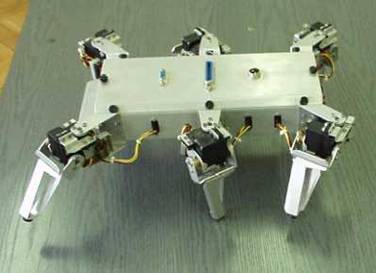
One
machine, BAJTEK has 4 legs and 8 DOF. The second prototype, MENTOR has 6 legs and
12 DOF.
The
current work focuses on the development on the on-board high level control
using PC-104 and real-time operating system, the aim is to increase the
autonomy of motion by inclusion of simple sensors (contact and proximity
sensors). Both machines bring the platform for the students research on
walking machines and properties of mechatronics systems. By the
modifications and improvements of control system, the users will learn the
practical problems of real-time control of complex robotics systems.
|