Projects
Members
Video highlights
Sponsors
Links
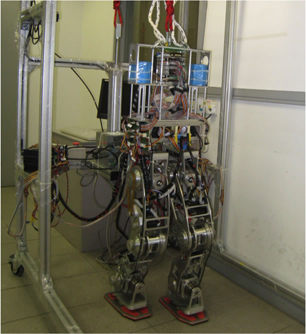
NUSBIP III
The aim of this research is to design and build bipedal robots that can achieve dynamic walking on level and rough terrain.
© Copyright 2003-2005 Team ROPE, COME Lab, NUS.All Rights Reserved
Latest update 2008-01-17