|
Projects |
 |
 |
 |
 |
 |
 |
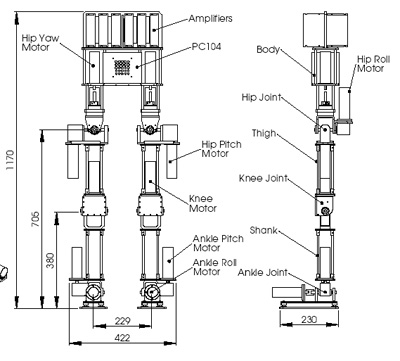
NUSBIP - I is the first prototype of the life-sized bipedal robot built under this project. It consists of two legs and a torso. Figure below shows a photo of NUSBIP-I. Each leg of the robot has 6 degrees of freedom (DOF): 3 DOF at hip, 1 DOF at knee and 2 DOF at ankle.
Most of the leg joints of NUSBIP-I are driven through a 90 degree miter gear which include hip pitch, hip roll, knee pitch and ankle pitch joints. This design was found to have a backlash problem. Transmission of motion through miter gear has resulted in a large amount of backlash - about 10 deg. Also it was found that the motion of the joint was not smooth. Thus, NUSBIP-II was designed with all the joints driven directly by the motors eliminating miter gears.