|
Projects |
 |
 |
 |
 |
 |
 |
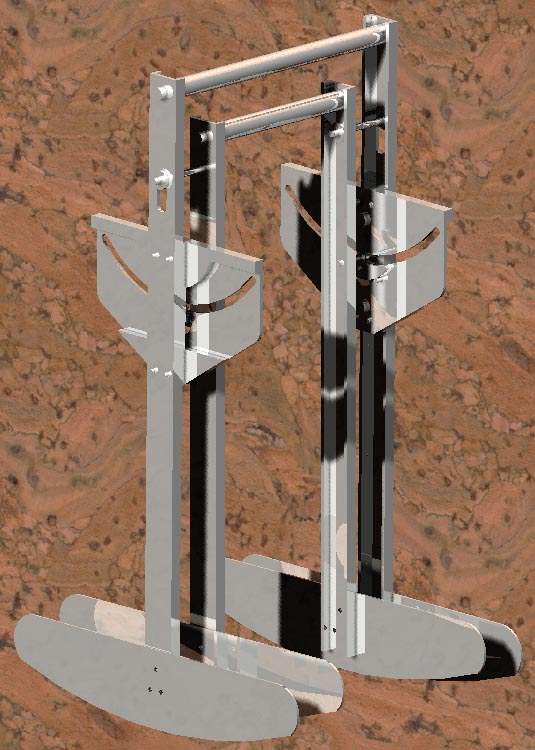
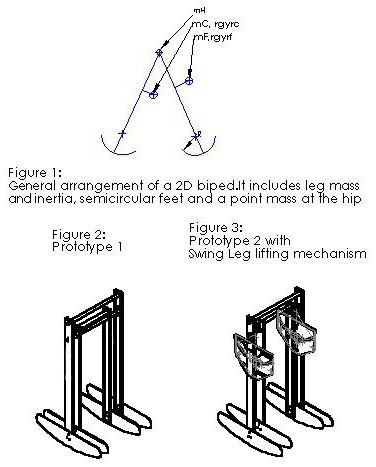
The passive walking system was inspired by the motion of a rolling wagon wheel. The rolling motion can be transformed into a walking motion by simply splitting the rim from the wagon wheel. Then discard all but two spokes, leaving a pair of legs with semicircular feet. In this project, a model that has a 2D motion was studied. This simplifies motion but poses new problems - how to keep the system motion 2D, and how to clear the swing foot from hitting the ground. The practical motivation for studying passive walking is because of its mechanical simplicity and relatively high efficiency. There is no need to control speed and direction of motion as well, and hence, spares the worry of generating a substrate motion. The objective of this project is to study and analyze the passive walking behavior.
Current Project Status Currently, simulation studies on the passive walker is being performed. This simulation study is to analyse the parameters that would affect the walking behavior. To verify the simulation data, a passive walker has been designed. It is currently under fabrication.
Videos [New Videos Added!!] Trial Run of First Prototype [Video-PassiveWalker] Walking Down A 3 Degree Slope [Video-3Degree] Walking Down A 4 Degree Slope [Video-4Degree] Walking Down A 5 Degree Slope [Video-5Degree]
|