|
Projects |
 |
 |
 |
 |
 |
 |
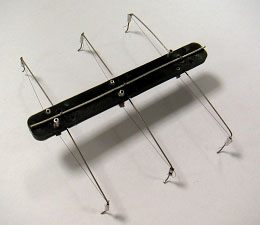
This project will study various control architectures to generate the walking gait of the robot. This is implemented in the form of a Central Pattern Generator (CPG). Genetic algorithm is then used to search for the optimised gait pattern based on some predetermined performance function. CPG is a system of loosely coupled oscillators capable of generating different gait patterns. Such mechanism is thought to be the basis for gait patterns in animals and humans. The neuron that forms the element of CPG is simple element that needs little computation. Each leg has one neuron that provides it with activation signal. All neurons are connected to themselves and each other and also receive input from three external sources -to determine straight walking, left turn, or right turn. Genetic Algorithms (GAs) are general-purpose search algorithms based upon the principles of the evolution observed in nature. They combine selection, crossover, and mutation operators with the goal of finding the best solution to a problem. GAs search for this optimal solution until a specified termination criterion is met. The neural CPG going to be used has no learning ability of its own. A GA is to be used to find appropriate neuron parameters. The GA is appropriate because the relationship between the parameters of the CPG and the gait it produces is complex.
Current Project Status |