Current Projects
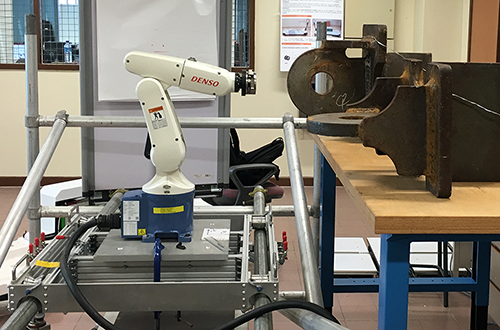
Automatic eyelet workpiece welding using mobile manipulator
“Eyelets” are workpieces that are welded onto various surfaces of large structures (such as containers and heavy platforms) to provide lifting points. Manual welding of eyelets is labor-intensive and time-consuming. Our research aims to develop a robot-enabled system utilizing 3D modelling and mobile manipulator to improve efficiency and reduce manpower requirement for such a welding task.
Effectively simultaneous localized manipulation of multiple magnetic micro-particles
The key challenge in manipulating multiple magnetic micro-particles individually and simultaneously lies on the ability to localize the magnetic field applied on an individual particle. This provides a direct means to apply force and torque on individual particles without significantly affecting other particles in an ensemble. Our research aims to develop a micro-magnetic field manipulation technique that enables the application of highly localized magnetic fields on a micro-particle.
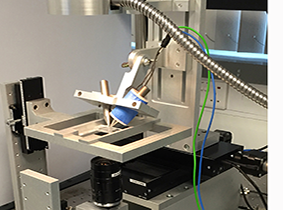
Adaptive robotic task execution with in-situ model error compensation
In computer-integrated manufacturing industries, it is a common issue that a manufactured work piece does not accurately correspond to its original/nominal virtual 3D model. This issue often leads to errors in processing the work piece by a robot. 3D scanning technology in combination with reverse engineering techniques are used to determine the 3D CAD model of the work piece. This scanned model is then compared to the original model based on model difference identification algorithms to determine the model error. Our research aims to compensate such model errors by augmenting the robot trajectory control with an error-compensation loop.
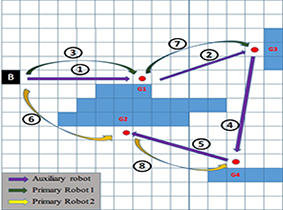
Mobile manipulation and robotic workcell planning and optimization
A mobile manipulation system consists of one or more robotic manipulators mounted on a mobile base. Such systems can significantly extend the workspace of the individual manipulators by leveraging on the maneuverability of the mobile base. Our research first aims to optimize the motion of the mobile manipulator and the coordination of multiple mobile manipulators, and then to optimize the planning of a manufacturing workcell in which such mobile manipulation systems are used.
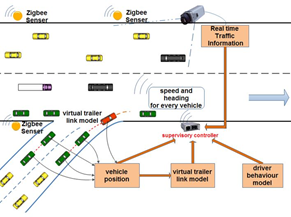
ARMCON: An Assistive Ramp-Merging Control System for Dense Traffic Management
Contrary to intuitive thinking, the culprit of traffic congestion is not simply the sheer number of vehicles on the road. Empirical studies have revealed that driver behaviour plays a key role in the forming of traffic congestion. The effect of driver behaviour on traffic congestion is the most prominent in the dynamics of on-ramp merging, which is known to be one major cause of traffic congestion in large cities. Our research aims to develop an Assistive Ramp-Merging CONtrol (ARMCON) system to guide the on-ramp driver when merging with the main traffic on the express way in order to minimize the disruption of the main traffic on the express while a certain merging rate is maintained.
A Transformative Polymer-based Heat Exchanger with a Modular Multi-Core System of Curved Microfluidic Channels Utilizing the Inherent Unique Dynamics of Dean Vortices (THERMIC)
Conventional heat exchangers are usually large, heavy, and costly to operate due to its limited efficiency in convective heat transfer. Our research aim to address these issues by developing a novel method for building a lower-cost yet more efficient heat exchanger, using a specially designed microchannel (with enhanced fluid-mixing characteristics) for transferring heat from one channel to another more efficiently.
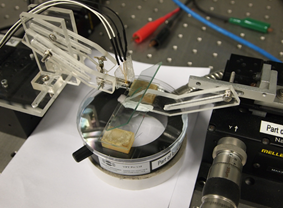
Active manipulation of ECM stiffness
The mechanical properties of the microstructures surrounding cells influence cell behaviour in processes such as differentiation, proliferation, and apoptosis. One such mechanical property is the stiffness of the extracellular matrix (ECM). For biosystems/bioengineering research, an immediate challenge is to develop engineering solutions to directly manipulate the ECM in order to produce the desired changes in its stiffness. Our research focuses on developing the technique of actively constrained microrheology (ACmR) for the manipulation of the ECM stiffness to influence cellular behaviour.
Microinjection of silkworm eggs for high throughput transgenic silkworm creation
The crucial step in creating transgenic silkworms is the proper injection of foreign DNA material into the silkworm eggs. In the current state of art, there is no fully automated system specifically designed for microinjection of silkworm eggs whose shells are hard and brittle. The existing methods mostly rely on human operations which suffer from low throughput and poor efficiency. Our research aims to develop a fully automated micromanipulation system for batch microinjection of silkworm eggs. Our experimental results demonstrate that our current prototype provides a potential practical engineering solution for high throughput microinjection.
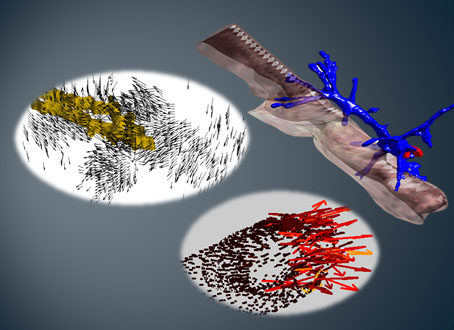
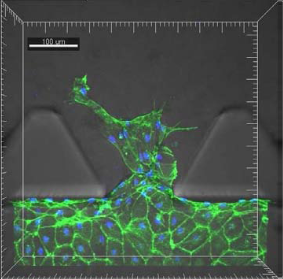
Modelling and analysis of interaction between endothelial cells and ECM
Cell-ECM interaction influences many cellular activities and behavior. Most reported studies focused on the setting in which a single cell was seeded on a substrate. Such 2D (or 2.5D) cell-substrate interaction forms focal adhesions that are different (in terms of molecular components and their functions) from those formed in a 3D setting. Our research aims to characterize mechanical interaction between endothelial cell and ECM in 3D using the technique of passively constrained microrheolog (PCmR) that we have developed, focusing on the effectiveness of cell-induced ECM deformation and cellular traction force as stable cell markers.

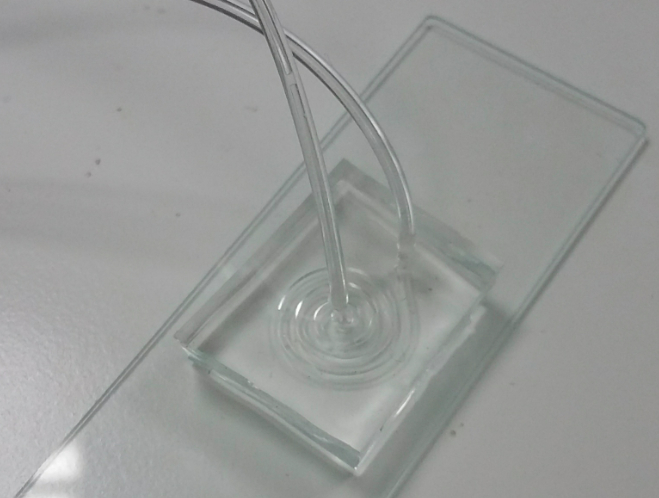
Automatic generation of shear flow for silk strand formation
It has been observed that stirring, shaking and mechanical agitation of silk protein solution promote silk strand formation due to the effect of the shear flow on amyloid fibril formation in vitro. Shear flow (Couette flow) is generated when two parallel plates separated by a liquid move relative to each other, which creates a uniform velocity gradient in the fluid. Our research aims to develop mechanical techniques that promote silk strand formation by creating desirable patterns of shear flow in a silk protein solution.
Contact us
Peter C.Y. Chen (PhD)
Associate Professor
Department of Mechanical Engineering
Faculty of Engineering
National University of Singapore
Email: mpechenp@nus.edu.sg