News
- 12/17: Wang Heng returned to our group as a Research Engineer. Welcome back!
- 12/17: Yazhini left to join Panasonic R&D Center in Singapore. All the best!
- 12/17: Our paper, entitled "Determination of Green's Function for Three-dimensional Traction Force Reconstruction Based on Geometry and Boundary Conditions of Cell Culture Matrices", was accepted for publication in Acta Biomaterialia.
- 12/17: Our paper, entitled "Numerical Study of Heat Transfer Enhancement of Roll-to-roll Microchannel Heat Exchangers", was accepted for publication in the Journal of Heat Transfer.
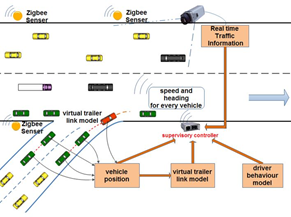
- 10/17: Our paper, entitled "The Concept of Stimuli-Induced Equilibrium Point and Its Application in Ramp-Merging Control", was accepted for publication as a regular paper in the IEEE Transactions on Intelligent Transportation Systems.
Welcome
We engage in the research and development of methods and their applications in the areas of microsystems and robotics. Our research focuses on mechanical manipulation of physical and biological systems at micro to macro scale, with the aim of producing practical and innovative engineering solutions.
We actively seek opportunities for collaboration with peers and with industry. If our methods and technologies are useful for your R & D work, we invite you to get in touch with us. For prospective students (at all levels) who aspire to specialize in microsystem engineering and robotics, we welcome you to join us.

Peter C. Y. Chen Associate Professor Department of Mechanical Engineering mpechenp@nus.edu.sg
Latest Projects
ARMCON: An Assistive Ramp-Merging Control System for Dense Traffic Management
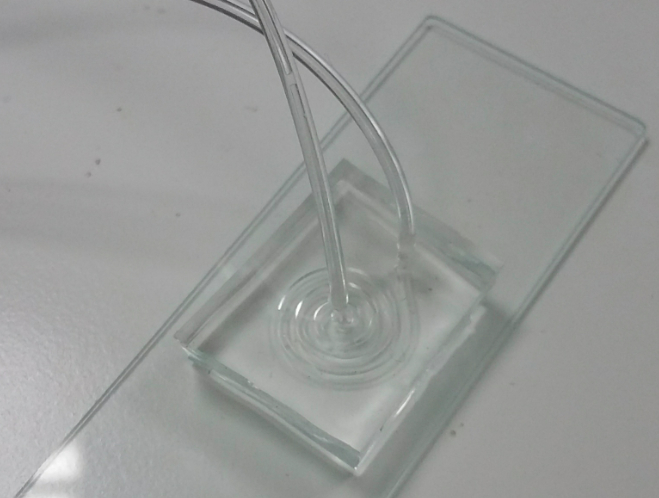
A Transformative Polymer-based Heat Exchanger with a Modular Multi-Core System of Curved Microfluidic Channels Utilizing the Inherent Unique Dynamics of Dean Vortices (THERMIC)
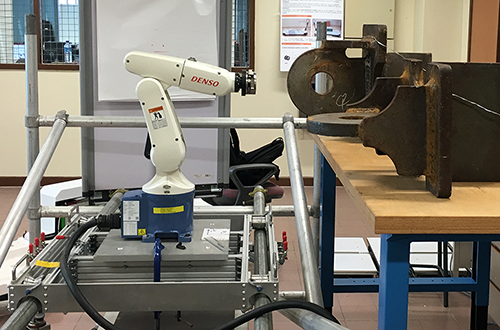
Automatic eyelet workpiece welding using mobile manipulator