 |
Projects |
 |
 |
 |
 |
 |
 |
In the recent years, the development of humanoid robots has taken a rapid pace. The intense multi-disciplinary research into robotics during the last two decades, combined with the advancement of technology is leading to the development of humanoid robots. The day is not too far when the robots not only work for human beings but also work along with human beings; the dream of human-kind for several centuries.
The factors that provide the necessary impetus for the development of humanoids include requirement of robots in hazardous environments and the increasing number of elderly population. Also because of their greater flexibility in maneuvering various terrains, they can be a valuable tool in space explorations.
There are many research organization and academic institutions around the world that are actively involved in the research of humanoid robots. Some of the most impressive and successful robots include ASIMO, QRIO, HRP-2P etc.
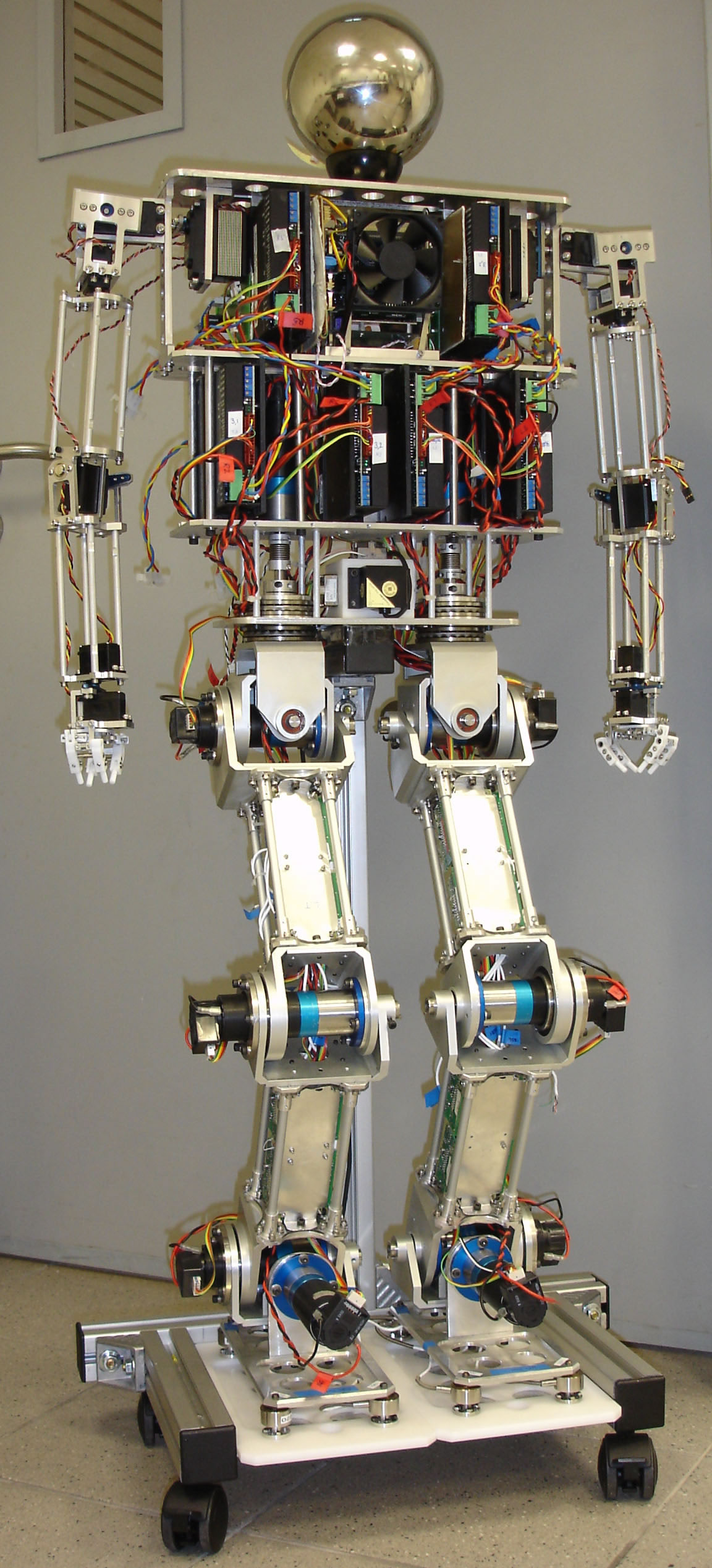
The National University of Singapore has been working on the biped walking research since 2001. As a part of this, NUSBIP a life-sized humanoid robot is created. The main aim of its creation is to aid in the research of bipedal walking. NUSBIP-II is an anthromorphically modeled life-sized humanoid robot. This life sized bipedal robot was designed after a 10-year old child (i.e. weight distribution and size) and consists of a torso, two legs and two arms. It has total 22 degrees-of-freedom: Each leg has 6 DOF (with 3 at hip, 1 at knee and 2 at ankle) and Each arm has 5 DOF (with 3 at the shoulder, 1 at elbow and 1 at wrist). A gripper is attached to the arm for holding smaller and lighter objects. All the joints of the leg are powered by DC Micro-motors coupled with planetary gear set. And the arm joints are powered by digital servomotors. NUSBIP also consists of many sensors that provide the necessary feedback in the control of walking. NUSBIP-II is the modified version of the first version NUSBIP-I. Click here to view the specifications of the first two prototypes of NUSBIP. The Table below gives the specifications of NUSBIP-II Picture Gallery of NUSBIP-II |
 |
Data Sheet of NUSBIP-II
| DOFs | 22 | |
| Size (Height without head) | 1.15m | |
| Total Weight | 28 kg | |
| Power Supply | External | |
| Sensors | Load cells, Gyroscopes, Accelerometer and encoders | |
| Actuation | Leg Joints | DC Micro-motors coupled with planetary gear heads |
| Arn Joints | Digital servo motors | |
This project involves many aspects of engineering and other technical skills, such as: mechanical design, control systems, sensors, noise filtering, computer systems, computer programming and most of all, troubleshooting skills. The main objectives that must be achieved by this robot are:
- to walk dynamically at a speed of 1m/s, and
- able to adapt on different walking terrain
- be reliable and easy to repair.
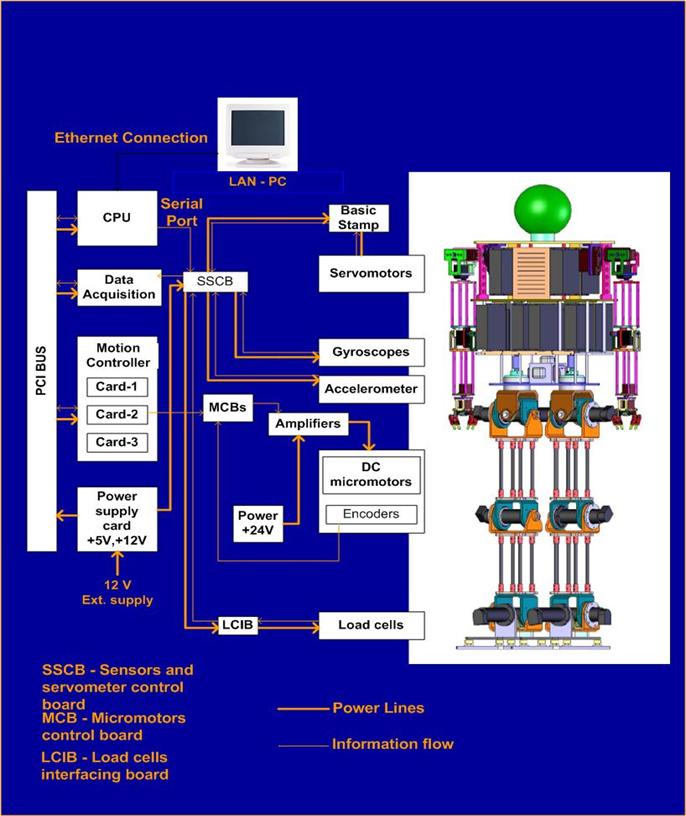
Control System
The basic architechture of the control system of NUSBIP-II is shown below. The central processing unit (CPU) is the brain of the control system of NUSBIP-II. It receives the feedack data from various sensors of the robot, performs the necessary computations and sends the command signals to the actuators. Motion controllers and the Basic stamp are the low level controllers that control the leg and arm actuators respectively. Data Acquisition receives analog signals from the various sensors mounted on the robot and converts them in to digital form.
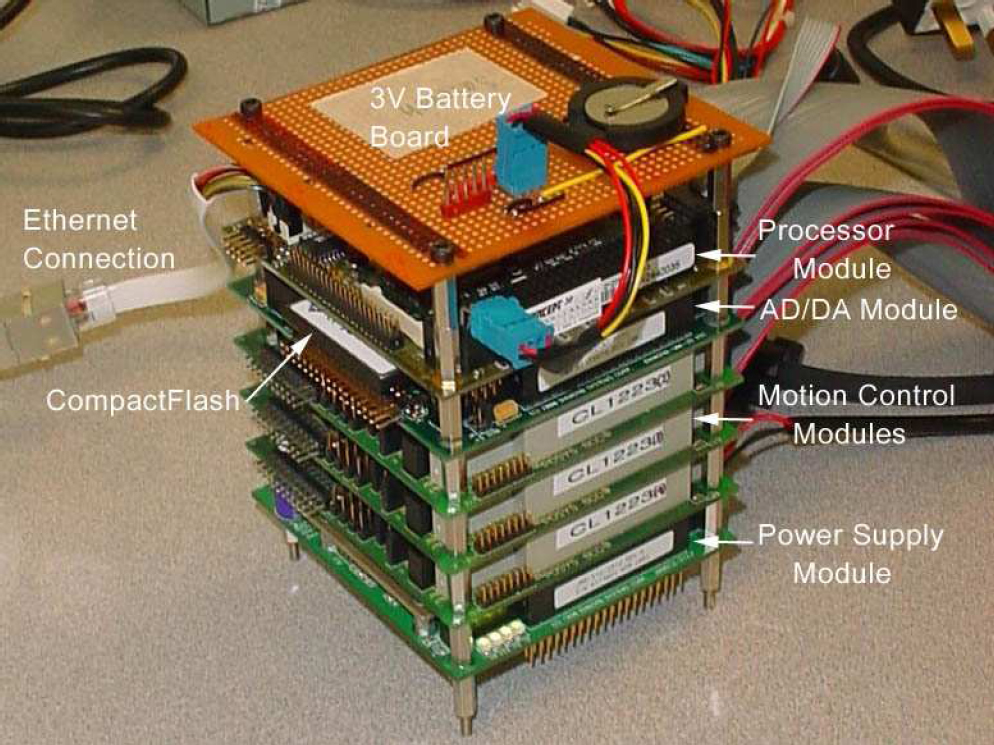
PC-104 based embedded system is used as the CPU for NUSBIP. PC/104 systems are similar to standard desktop PC's but are smaller in size and less in weight. Also, PC/104 based systems are chosen for the motion control and data acquisition modules. Figure below shows the stack of PC/104 modules used for NUSBIP.
Click here to view more picutres of NUSBIP-II (Picture Gallery)