|
|
Specifications: |
RO-PE II  |
|
Classification:
Height:
Dry Weight: |
Striker
495mm
2.5kg |
RO-PE III  |
|
Classification:
Height:
Dry Weight: |
Goalkeeper
580mm
3.8kg |
RO-PE IV  |
|
Classification:
Height:
Dry Weight: |
Striker
430mm
3.3kg |
|
RO-PE V .JPG) |
|
Classification:
Height:
Dry Weight: |
Def/Striker
550mm
2.9kg |
|
The RO-PE series
Our robots are designed and constructed for participation in the RoboCup and FIRA competitions. These are two international robotics bodies that organise annual humanoid-robots soccer-playing competitions.
Participating robots will have to be able to detect and approach a ball, and be able to dribble it through the opponents and kick the ball into the goal. Different strategies and decision making algorithms will be explored. This project is also an excellent platform for technological education, especially in the areas of control, mechanical design, machine vision, system integration.
A Test Bed : RO-PE I
 |
Our first humanoid robot, RO-PE I has been built to test the performance of several components such as actuators and sensors as well as the mechanical design.
We have managed to make it walk statically. With enough experience and confidence gained from developing RO-PE I, we are now able to construct taller bipeds with stronger structure.
<< (Left) Walking bi-ped, RO-PE I |
Debut : RO-PE II
  |
RO-PE II, our debut robot in RoboCup event in 2004 Portugal, ranked second in the H80 category with a 5th overall ranking, among 13 participating humanoid robots.
For details on the RO-PE II and its performance in RoboCup 2004, click here.
<< (From far left) Metallic casing, During competition in Portugal '04 |
A Reliable Custodian : RO-PE III
  |
The design of RO-PE III is based on its predecessor RO-PE II. Several mechanical design modifications have been introduced for improving the robot's performance. PC-104 remains as the heartbeat of the robot.
Click here to find out more about RO-PE III and its performance in RoboCup 2005.
<< (From far left) Geared up for performance, a black finish for Osaka'05 |
Performance Ready : RO-PE IV
(From left to right) Testing in lab, a black finish for Osaka'05 |
RO-PE IV performed well in RoboCup 2005, emerging in the finals of the Penalty Kick section, scoring a total of 10 goals en route. It has also proved its ability as a highly mobile machine, scoring several goals on the way to the semi-finals of the 15-team, 30-robot competition. It is a true performer with proven calibre.
RO-PE IV (left) has a total of 22 DOFs, 6 DOFs being on each leg, 4 DOFs on each arm and 2 DOFs on the waist. Each DOF is actuated with RC digital servo motors. Microcontroller board has replaced the PC-104 to make the whole weight of the robot less.
Click here to find out more about RO-PE IV. |
Versatile : RO-PE V
|
 
A highly agile and mobile RO-PE V |
RO-PE V represented NUS in RoboCup 2006 and 2007, performing credibly to reach the quarterfinals and semifinals respectively.
The robot runs on a PC-104, using advanced vision omni-vision technology to provide instant localisation possibilities.
Click here to find out more about RO-PE V. |
Goliath : RO-PE VI
|
 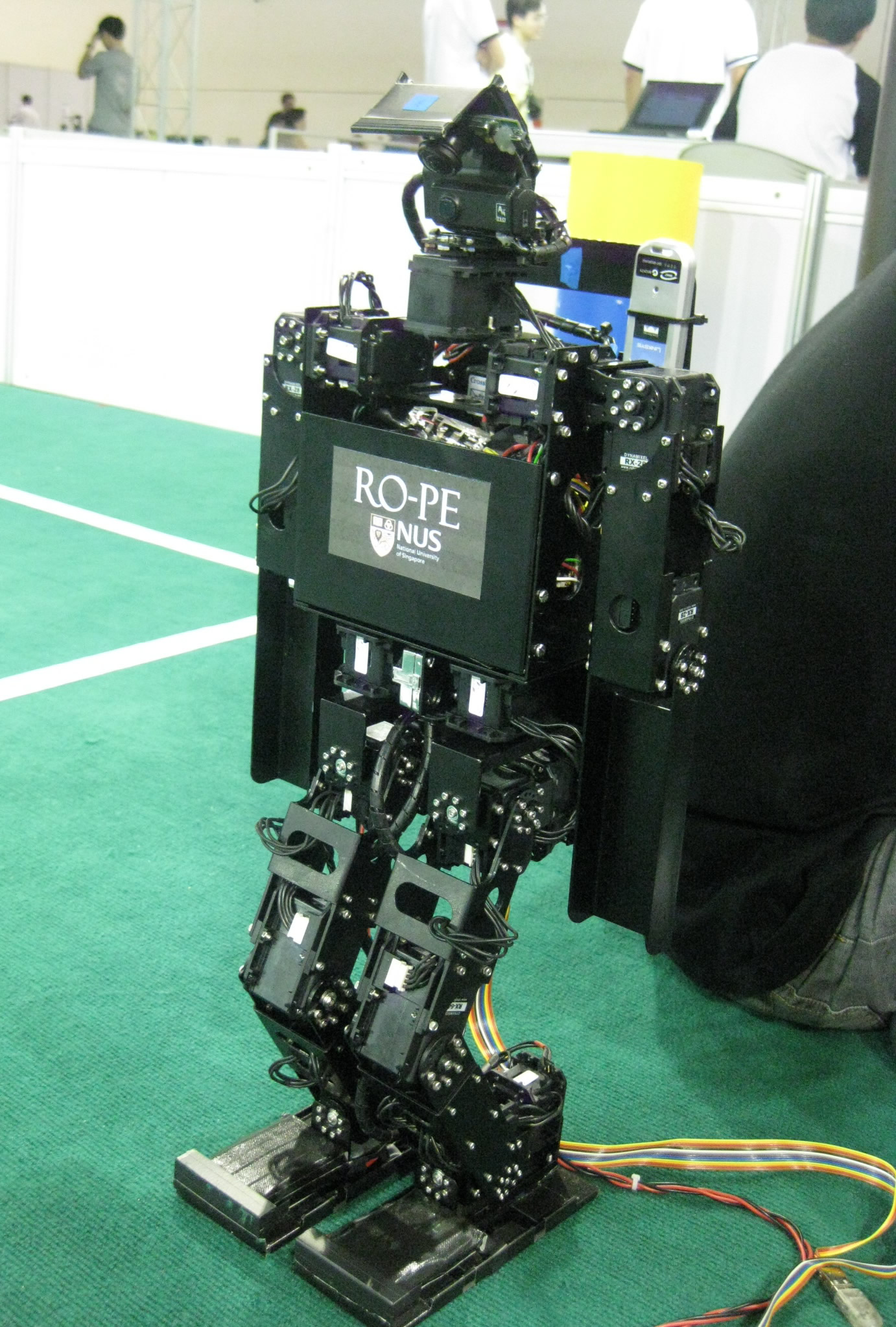
The strong and powerful RO-PE VI |
The performance of RO-PE VI greatly exceeded our expectations in RoboCup 2008. RO-PE VI has scored more goals in one league then all of our previous robots combined.
The robot uses a combinations of RX-28 and RX-64 servos to give itself superior torque and motion. And its double camera vision system allows it to track both long and short range ball in the field.
Click here to find out more about RO-PE VI. |
|
